


 45Likes
45LikesRotor Master


 09-20-2023, 10:01 AM
09-20-2023, 10:01 AM
#63
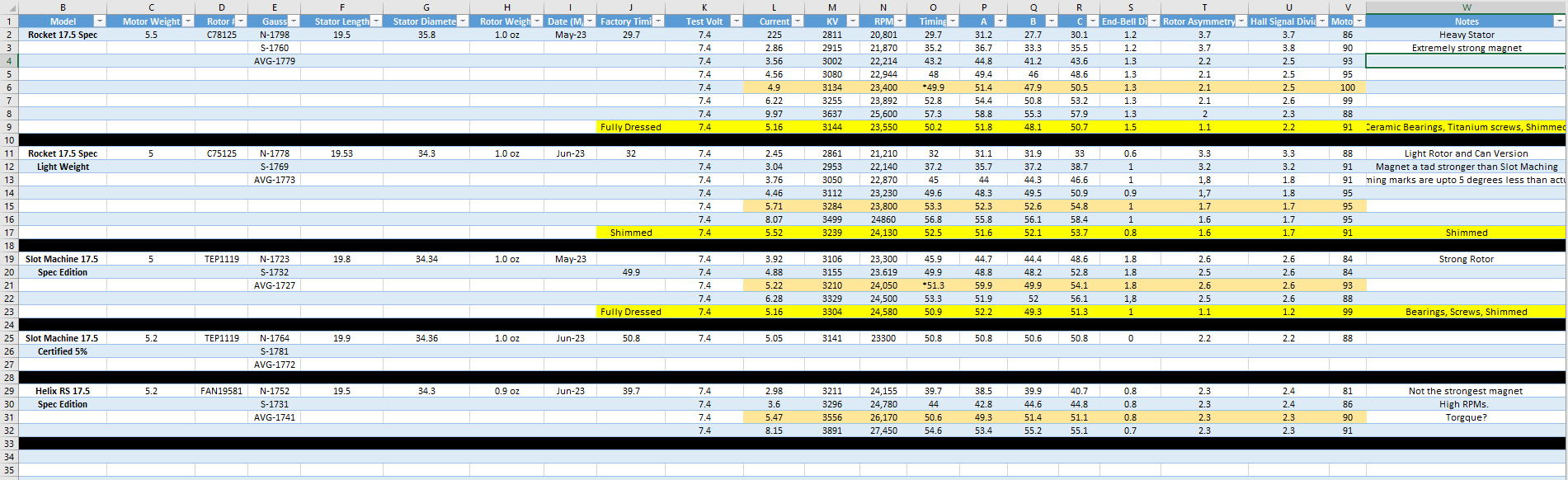
I have only tuned a few motors so still learning. I have also noticed significant improvement in the rotor asymmetry after shimming so that the rotor is a little closer to the Hall effect sensors (but not so close as to risk touching). I assume the shimming does not improve the rotor performance, just improves the consistency of the rotor triggering the sensors. Then again, Electromagnetics was my worst subject in college 40 yrs ago 
09-20-2023, 10:46 AM
#64
I have only tuned a few motors so still learning. I have also noticed significant improvement in the rotor asymmetry after shimming so that the rotor is a little closer to the Hall effect sensors (but not so close as to risk touching). I assume the shimming does not improve the rotor performance, just improves the consistency of the rotor triggering the sensors. Then again, Electromagnetics was my worst subject in college 40 yrs ago
Yes, that is accurate. I messed around with shimming and found that the motor doesn't always run better if you shim the rotor closer to the endbell. The asymmetry goes up, but the amps go up and the rpms go down.
09-25-2023, 03:57 PM
#65
I ran a video on the Rotor Master. Let me know if I need to change something.
https://youtu.be/YQ5pbAthSq8
https://youtu.be/YQ5pbAthSq8
09-27-2023, 07:02 AM
#66
Can anyone give me some info on bigger rotors to pick up so I can test different sensors for higher readings? When looking at these I see 13.0mm, 13.5mm, 14.0mm. I just am not sure which flavors are relevant. Would also be nice if they come with numbers so I can have a baseline to start off with.
09-27-2023, 09:37 AM
#67
 09-27-2023, 10:10 AM
09-27-2023, 10:10 AM
#68
Interesting project! Just curious - since you mentioned that you implemented an external 12-bit DAC, did you consider/discount using an RP2040? IIRC, it has a 12-bit ADC built-in.
09-27-2023, 11:31 AM
#69
But for future projects I am starting to look into the esp32.
10-02-2023, 11:30 AM
#71
I try to be extra careful that I don't get rotors close to each other anymore, not only that but I had one break as well when it slammed into another.
10-02-2023, 01:01 PM
#72
Yes, putting them close together changes them, but I only had them in that case to take the picture. I don't like to store them in there because I know it will change the rotors strength. However, I noticed this before I put them in that case together.
10-02-2023, 08:30 PM
#73
Could be the case, you still have essentially my prototype case. Also I do know that my programming has changed a little. I average 30 reads with any new unit going out. On top of that I have increased the resolution of the adc by 2 more bits by oversampling. That way my mod version will be able to read up to 4000 with a resolution of 1.
But regardless, I have found that the readings are stable from power up to power up so long as the rotor doesn't get near another rotor.
But regardless, I have found that the readings are stable from power up to power up so long as the rotor doesn't get near another rotor.

