


 13Likes
13LikesCustom built motolyzer
 01-07-2019 | 05:13 PM
01-07-2019 | 05:13 PM
#16

Lap traffic is going to have an impact on the consistency number. If you can drive to 95%+ consistency in a race you are going to get held back some by lappers, trust me. Have you ever lapped second place in race?
In practice, if you can do a 15.1 as your fastest lap, and you can regularly run 15.2's and 15.3's and you swap in a new motor (or make whatever other adjustment), and your new fastest lap is a 14.9 and you can now hit 15.0's and 15.1's on the regular, then you can say for sure the change was valid. If your best lap time happened once, an you can't hit it regularly, you are not consistent enough to notice if something is truly better.
In practice, if you can do a 15.1 as your fastest lap, and you can regularly run 15.2's and 15.3's and you swap in a new motor (or make whatever other adjustment), and your new fastest lap is a 14.9 and you can now hit 15.0's and 15.1's on the regular, then you can say for sure the change was valid. If your best lap time happened once, an you can't hit it regularly, you are not consistent enough to notice if something is truly better.
 01-13-2019 | 09:00 PM
01-13-2019 | 09:00 PM
#17
Had a conversation with a fellow racer at the track specific to this thread, and we tossed some interesting ideas with regards to combining tools to see what the results would reveal. Reading thru some of the responses in this thread, there are a variety of opinions and I appreciate those. I like testing motors and this is something I enjoy as part of the hobby. For some, the results of testing is not interesting to some and I agree it's not for everyone. But if there was a good way to find parity in motors for events, this could be beneficial for those events, and for club racing.
Since I have built my own dyno, the recent conversation at the track triggerred thoughts about combining a motor analyzer with that of the dyno.
Not certain if this would be feasible, however it would be interesting to see if a flywheel load would have on that of timing. Would results be different when testing without a load? I think there may be differences, and I have a feeling that the differences would be marginal.
Looking for your thoughts.....
Since I have built my own dyno, the recent conversation at the track triggerred thoughts about combining a motor analyzer with that of the dyno.
Not certain if this would be feasible, however it would be interesting to see if a flywheel load would have on that of timing. Would results be different when testing without a load? I think there may be differences, and I have a feeling that the differences would be marginal.
Looking for your thoughts.....
01-14-2019 | 02:53 AM
#18
Tech Master
iTrader: (4)
Joined: Dec 2018
Posts: 1,065
My consistency is usually in the 98-99% range, and I still often get times that vary by more than half a second between back to back runs as the track changes. I now measure my lap time improvements by comparing my delta to other consistent racers in my run. Obviously that assumes that they aren't making changes too, but so far it has been a bit more reliable than absolute lap times.
I try to set the hero lap for my class, and have my 5 fastest laps average withing 1/10th of a second of my hero lap. I also shoot for the same rate of change over 10 & 15 lap intervals. I track how close my averages are to the absolute limit.
My numbers are running on wet clay off-road. Sounds like you run on-road on carpet. Being consistent on a surface where the grip level changes is harder to get consistent. Moisture and dust are always different, this induces a bit more hysteresis in my numbers. Additionally, I race in 3D. Jumps add a bit of uncertainty.
Slow and steady wins the race. Until someone can go faster than you, and still not make enough mistakes to give back that time they've gained on you. If you can drive to 90% of the absolute limit with 99% consistency it will always be slower than someone who can drive at 98% of limit with 97% consistency (my personal best ever race off-road was 97.2% consistency btw). When you drive that far off the limit on a high grip surface you are cupcaking around. You need to drive harder.
Since you seem to be ignoring a simple yes/no question I'll ask again. Have you ever lapped second place more than once in a race? Have you ever entered a race where your class had an H or I main? If you race with a very small crowd it means you have a very small sample size. This means there is a great likelihood nobody you race with is actually at the limit. Have you ever finished on the same lap as Kyle McBride? He is the only Aussie who can run on the World's A-main level.
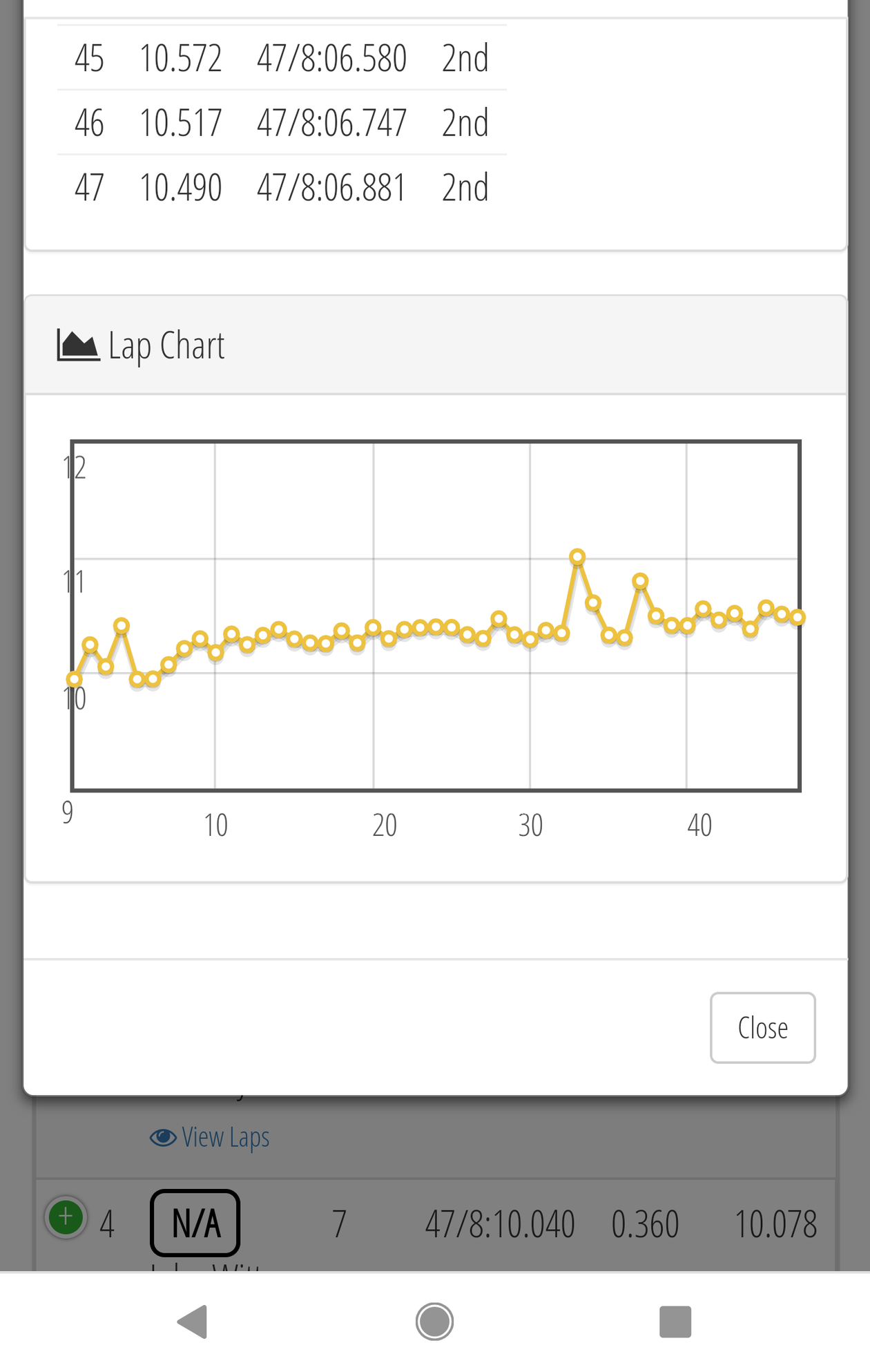
Here is a picture of one of my best runs this year. There were not enough 17.5 buggies for a class so I had to run the mod 2wd buggy class. I kept my car setup blinky with a 17.5 Notice my top five average is faster than the guy that won the race. To do that with a blinky 17.5 against mod cars is nothing short of incredible.
I am car #3 (no sponsors btw). Cars #1, 6, 5, 9 are AE sponsored drivers. Car #7 is a Yokomo sponsored driver, car #2 is a Serpent sponsored driver.

Max,
You will never build a dyno that will replicate exactly what happens on track. Instead of spending a bunch of time and money to run simulations, just get a speed control that does data logging, and start watching how the data changes when you make changes when you run on the track. This gives you the added benefit of improving your driving (where you will see the largest gains).
A motor has an infinitely adjustable range of timing, but the precision of orientation and manufacturing of the hall effect sensors means that even if you could find a theoretical perfect timing setting that the noise within the sensor assembly will only give you an approximation of where that perfect timing actually is. Basically there is a 4� window where the motor will perform best.
Beyond that, the real limitation is that you have a resolution based on gear ratio steps. You have to select the right gear ratio for the track layout, and set your timing off of that. You can run a bunch of simulations and set your timing and gearing, but ultimately it is just a starting point. A change from you simulation driven settings will likely result in lower lap times. Lap times you may or may not be able to notice, depending on your driving ability.
01-14-2019 | 06:42 AM
#19
Tech Master
Joined: Jul 2018
Posts: 1,011
From: Florida
Allot of people would think toy cars are a waste of time but you dont know until you know. Go for it brother. I didnt know what your objectives were but if its to even the playing field that is pretty interesting too. Im sure you have read some of my ramblings and I have even said some things that might sound contrary but here are some things you might consider if you are trying to analyze or dyno motors. See if the science that is being applied to electric motors can guide your dyno analyzer project. think inertia and how to apply data from a track or data to the track.
electric motors are not like combustion motors. Youve heard it said and its usually followed by some example that is not connected to the fundamental reason why they are different. I challenge you to compare my explanation to what people are saying about the acceleration of the Tesla type-s. When you are thinking about how to move something you have to understand 1 of 2 things before you designing it. Is it a constant work (power) type of application or is it an acceleration/deceleration focused application? Its a math problem. The application (track) plus mechanical=motor requirement. High end electric motors are not power only motors. There is a percentage of work they do and a percentage of acceleration. You determine the percentage of the application to skew the design. It doesnt skew the design a little it is the foundation of the design.
What current dyno do not do and why combustion engine history does not apply to high performance electric motors. Work application and acceleration applications and everything in between is step 1. If you want to start and stop and do work you want to know how well the inertia of the motor is matched to the load. A dyno that calculated the change in inertia based on mass, friction, and gearing would be magical and I promise the juice is worth the squeeze.
I�ll leave that at that and you can ask more questions if you are interested. You mentioned you wanted to level the playing field. This is one way you can do it. Look up the open ESC project. Its for hover boards. They have developed modular code and you may be able to use some of what is there but in the end if you end up with a current loop that gets its demand from a velocity loop (I dont think any rc esc has this currently) you can even the playing field. Its impossible to be on peak power and be efficient simultaneously. You can be one or the other but not both at the same time. What you can do is switch modes between power and efficiency fast enough that it is imperceptible to a human. With a torque and velocity loop you program a third routine that is a max level of the 2 combined. If torque exceeds the limit then the current loop pulls back on the available torque. If RPM exceeds the current loop removes velocity. Its a power limit pure and simple. Then you get to decide if you limit power at the mechanical ouput or the motor output. That opens up allot of fun for everyone.
electric motors are not like combustion motors. Youve heard it said and its usually followed by some example that is not connected to the fundamental reason why they are different. I challenge you to compare my explanation to what people are saying about the acceleration of the Tesla type-s. When you are thinking about how to move something you have to understand 1 of 2 things before you designing it. Is it a constant work (power) type of application or is it an acceleration/deceleration focused application? Its a math problem. The application (track) plus mechanical=motor requirement. High end electric motors are not power only motors. There is a percentage of work they do and a percentage of acceleration. You determine the percentage of the application to skew the design. It doesnt skew the design a little it is the foundation of the design.
What current dyno do not do and why combustion engine history does not apply to high performance electric motors. Work application and acceleration applications and everything in between is step 1. If you want to start and stop and do work you want to know how well the inertia of the motor is matched to the load. A dyno that calculated the change in inertia based on mass, friction, and gearing would be magical and I promise the juice is worth the squeeze.
I�ll leave that at that and you can ask more questions if you are interested. You mentioned you wanted to level the playing field. This is one way you can do it. Look up the open ESC project. Its for hover boards. They have developed modular code and you may be able to use some of what is there but in the end if you end up with a current loop that gets its demand from a velocity loop (I dont think any rc esc has this currently) you can even the playing field. Its impossible to be on peak power and be efficient simultaneously. You can be one or the other but not both at the same time. What you can do is switch modes between power and efficiency fast enough that it is imperceptible to a human. With a torque and velocity loop you program a third routine that is a max level of the 2 combined. If torque exceeds the limit then the current loop pulls back on the available torque. If RPM exceeds the current loop removes velocity. Its a power limit pure and simple. Then you get to decide if you limit power at the mechanical ouput or the motor output. That opens up allot of fun for everyone.
Last edited by Bry195; 01-14-2019 at 02:20 PM.
01-14-2019 | 08:39 PM
#20
Thats a better way to track progress. Do you also look at how far your absolute fastest lap is off from the fastest lap set in your race?
To answer this question, yes, always. I have had races where my top 5 is 0.1 tenth of my fastest lap, then top 10 is 1 tenth off the top 5 and the top 15 is 1 tenth off the top 5. If you have a slower car lap time wise, you can still outdrive an opponent or the field and win with consistency. I've accomplished this in races this season.
I try to set the hero lap for my class, and have my 5 fastest laps average withing 1/10th of a second of my hero lap. I also shoot for the same rate of change over 10 & 15 lap intervals. I track how close my averages are to the absolute limit.
My response above is the same as this
My numbers are running on wet clay off-road. Sounds like you run on-road on carpet. Being consistent on a surface where the grip level changes is harder to get consistent. Moisture and dust are always different, this induces a bit more hysteresis in my numbers. Additionally, I race in 3D. Jumps add a bit of uncertainty.
This is true, however grip also changes in on road, in similar ways. Raise the temperature, and you have different conditions. Grip level also changes when traction compound works its way into the racing line. When traction is high, racing conditions can change very quickly at an event.
Slow and steady wins the race. Its funny you say this as my nickname at the track is "slow is fast" of which I embraced and cut vinyl to paint this on my touring car body.. Until someone can go faster than you, and still not make enough mistakes to give back that time they've gained on you. If you can drive to 90% of the absolute limit with 99% consistency it will always be slower than someone who can drive at 98% of limit with 97% consistency (my personal best ever race off-road was 97.2% consistency btw). When you drive that far off the limit on a high grip surface you are cupcaking around. You need to drive harder. I agree, and its more about driving very tight lines and not hitting anything if you have a slower car.
Since you seem to be ignoring a simple yes/no question I'll ask again. Have you ever lapped second place more than once in a race? Not in an Amain, but in lower mains, yes.
Have you ever entered a race where your class had an H or I main?
Yes, not as deep as an H / I main, but close to it.
If you race with a very small crowd it means you have a very small sample size. This means there is a great likelihood nobody you race with is actually at the limit. Have you ever finished on the same lap as Kyle McBride? No, don't even know who the fellow is.
He is the only Aussie who can run on the World's A-main level. The only driver out of Australia that I know of is Ryan Maker.
Here is a picture of one of my best runs this year. There were not enough 17.5 buggies for a class so I had to run the mod 2wd buggy class. I kept my car setup blinky with a 17.5 Notice my top five average is faster than the guy that won the race. To do that with a blinky 17.5 against mod cars is nothing short of incredible. Your consistency is what I strive for, of which I can and have achieved on more than one occasion in races this year.
I am car #3 (no sponsors btw). Cars #1, 6, 5, 9 are AE sponsored drivers. Car #7 is a Yokomo sponsored driver, car #2 is a Serpent sponsored driver.
Max,
You will never build a dyno that will replicate exactly what happens on track. If I wanted to replicate the track, I wouldn't have built one to begin with. The goal is to have an understanding of what a motor is capable of without having to burn thru set after set of tires, but rather use info that a dyno can provide to maximize results on the track without having the extra expense of tires.
Instead of spending a bunch of time and money to run simulations, just get a speed control that does data logging and start watching how the data changes when you make changes when you run on the track. I currently own and use a Tekin RSX, gen2, and gen 2 spec and is known as the telemetry guy at the track as I am constantly reviewing my race results. This gives you the added benefit of improving your driving (where you will see the largest gains). I've been experimenting with gearing for quite some time, trying to find the right combination. It was only recently where I started to dive into csv files to figure out what the best combination is. In most cases I've been gearing my cars so that I just barely flat line at the end of the straight. This methodology is hit and miss because depending on what the track layout is, the infield is where races are typically won..
A motor has an infinitely adjustable range of timing, but the precision of orientation and manufacturing of the hall effect sensors means that even if you could find a theoretical perfect timing setting that the noise within the sensor assembly will only give you an approximation of where that perfect timing actually is. Basically there is a 4� window where the motor will perform best. This I think is the goal of most racers who are looking to find that sweet spot on their motor. However again, track layout typically will influence this, as I have discussed dyno results with other racers at the track and they have said that power on the dyno doesn't always correlate to the track. Reason being is that if you have too much power, and your tires are slipping on the track, you are not going any faster because you are losing contact patch. Even data logs may not reveal this is happening as it could be a split second. The only symptom that I can think of is whether you can feel or sense if the vehicle is losing contact patch.
Beyond that, the real limitation is that you have a resolution based on gear ratio steps. You have to select the right gear ratio for the track layout, and set your timing off of that. Agreed. You can run a bunch of simulations and set your timing and gearing, but ultimately it is just a starting point. Agreed again. A change from you simulation driven settings will likely result in lower lap times. Lap times you may or may not be able to notice, depending on your driving ability.
To answer this question, yes, always. I have had races where my top 5 is 0.1 tenth of my fastest lap, then top 10 is 1 tenth off the top 5 and the top 15 is 1 tenth off the top 5. If you have a slower car lap time wise, you can still outdrive an opponent or the field and win with consistency. I've accomplished this in races this season.
I try to set the hero lap for my class, and have my 5 fastest laps average withing 1/10th of a second of my hero lap. I also shoot for the same rate of change over 10 & 15 lap intervals. I track how close my averages are to the absolute limit.
My response above is the same as this
My numbers are running on wet clay off-road. Sounds like you run on-road on carpet. Being consistent on a surface where the grip level changes is harder to get consistent. Moisture and dust are always different, this induces a bit more hysteresis in my numbers. Additionally, I race in 3D. Jumps add a bit of uncertainty.
This is true, however grip also changes in on road, in similar ways. Raise the temperature, and you have different conditions. Grip level also changes when traction compound works its way into the racing line. When traction is high, racing conditions can change very quickly at an event.
Slow and steady wins the race. Its funny you say this as my nickname at the track is "slow is fast" of which I embraced and cut vinyl to paint this on my touring car body.. Until someone can go faster than you, and still not make enough mistakes to give back that time they've gained on you. If you can drive to 90% of the absolute limit with 99% consistency it will always be slower than someone who can drive at 98% of limit with 97% consistency (my personal best ever race off-road was 97.2% consistency btw). When you drive that far off the limit on a high grip surface you are cupcaking around. You need to drive harder. I agree, and its more about driving very tight lines and not hitting anything if you have a slower car.
Since you seem to be ignoring a simple yes/no question I'll ask again. Have you ever lapped second place more than once in a race? Not in an Amain, but in lower mains, yes.
Have you ever entered a race where your class had an H or I main?
Yes, not as deep as an H / I main, but close to it.
If you race with a very small crowd it means you have a very small sample size. This means there is a great likelihood nobody you race with is actually at the limit. Have you ever finished on the same lap as Kyle McBride? No, don't even know who the fellow is.
He is the only Aussie who can run on the World's A-main level. The only driver out of Australia that I know of is Ryan Maker.
Here is a picture of one of my best runs this year. There were not enough 17.5 buggies for a class so I had to run the mod 2wd buggy class. I kept my car setup blinky with a 17.5 Notice my top five average is faster than the guy that won the race. To do that with a blinky 17.5 against mod cars is nothing short of incredible. Your consistency is what I strive for, of which I can and have achieved on more than one occasion in races this year.
I am car #3 (no sponsors btw). Cars #1, 6, 5, 9 are AE sponsored drivers. Car #7 is a Yokomo sponsored driver, car #2 is a Serpent sponsored driver.
Max,
You will never build a dyno that will replicate exactly what happens on track. If I wanted to replicate the track, I wouldn't have built one to begin with. The goal is to have an understanding of what a motor is capable of without having to burn thru set after set of tires, but rather use info that a dyno can provide to maximize results on the track without having the extra expense of tires.
Instead of spending a bunch of time and money to run simulations, just get a speed control that does data logging and start watching how the data changes when you make changes when you run on the track. I currently own and use a Tekin RSX, gen2, and gen 2 spec and is known as the telemetry guy at the track as I am constantly reviewing my race results. This gives you the added benefit of improving your driving (where you will see the largest gains). I've been experimenting with gearing for quite some time, trying to find the right combination. It was only recently where I started to dive into csv files to figure out what the best combination is. In most cases I've been gearing my cars so that I just barely flat line at the end of the straight. This methodology is hit and miss because depending on what the track layout is, the infield is where races are typically won..
A motor has an infinitely adjustable range of timing, but the precision of orientation and manufacturing of the hall effect sensors means that even if you could find a theoretical perfect timing setting that the noise within the sensor assembly will only give you an approximation of where that perfect timing actually is. Basically there is a 4� window where the motor will perform best. This I think is the goal of most racers who are looking to find that sweet spot on their motor. However again, track layout typically will influence this, as I have discussed dyno results with other racers at the track and they have said that power on the dyno doesn't always correlate to the track. Reason being is that if you have too much power, and your tires are slipping on the track, you are not going any faster because you are losing contact patch. Even data logs may not reveal this is happening as it could be a split second. The only symptom that I can think of is whether you can feel or sense if the vehicle is losing contact patch.
Beyond that, the real limitation is that you have a resolution based on gear ratio steps. You have to select the right gear ratio for the track layout, and set your timing off of that. Agreed. You can run a bunch of simulations and set your timing and gearing, but ultimately it is just a starting point. Agreed again. A change from you simulation driven settings will likely result in lower lap times. Lap times you may or may not be able to notice, depending on your driving ability.
Last edited by MaxRain; 01-14-2019 at 08:53 PM.
01-14-2019 | 09:09 PM
#21
Tech Master
Joined: Jul 2018
Posts: 1,011
From: Florida
Wait what-honest question that i dont know the answer to. i do suspect some things but I value your input for several reasons including experience and you are just faster than i am.
if i calculated the track requirements and i set the timing so that the peak of torque matched the average rpm i calculated for the track.....I go to race and im traction limited what would you adjust? i dont talk with allot of fast guys and nobody seems to agree with each other or disagree with me enough to adjust my understanding. What i do is adjust my tires and the mechanical features that influence the tire contact patch. Then i adjust the way the car transfers weight. i do all of this until the car is controllable or more. Then i focus on the electronic features like punch, smoothness, deadband to enhance or stabilize the car, most of the adjustments are about corners only because I think i handle the straights. So far adjusting traction for corners results in the beginning and end of straights being very stable and predictable. I got 30% more torque out of my 17.5 and it royally threw me off in the corners. Once I reworked the setup and electronics entry and exit of straights and corners were within my capability range. The mid-point of a straight was not that easy though. The place where the car has max speed.
I guess im wondering if my order of priorities is reasonable. Not as important is the centerpoint but Id love to hear about that too if you have something (or anyone). I suspect i can stabilize for high speed with toe or ride stiffness but im apt to just slow down or keep my hand steadier.
if i calculated the track requirements and i set the timing so that the peak of torque matched the average rpm i calculated for the track.....I go to race and im traction limited what would you adjust? i dont talk with allot of fast guys and nobody seems to agree with each other or disagree with me enough to adjust my understanding. What i do is adjust my tires and the mechanical features that influence the tire contact patch. Then i adjust the way the car transfers weight. i do all of this until the car is controllable or more. Then i focus on the electronic features like punch, smoothness, deadband to enhance or stabilize the car, most of the adjustments are about corners only because I think i handle the straights. So far adjusting traction for corners results in the beginning and end of straights being very stable and predictable. I got 30% more torque out of my 17.5 and it royally threw me off in the corners. Once I reworked the setup and electronics entry and exit of straights and corners were within my capability range. The mid-point of a straight was not that easy though. The place where the car has max speed.
I guess im wondering if my order of priorities is reasonable. Not as important is the centerpoint but Id love to hear about that too if you have something (or anyone). I suspect i can stabilize for high speed with toe or ride stiffness but im apt to just slow down or keep my hand steadier.
01-15-2019 | 04:07 AM
#22
Tech Master
iTrader: (4)
Joined: Dec 2018
Posts: 1,065
It really comes down to whether or not you race at one track, or if you regularly race at different tracks (and how different those tracks are in comparison to each other).
If you only race at one track, you only have to deal with one set of variables as inputs. The track isn't going to suddenly change in physical size from one weekend to the next, so your target gearing is not going to shift by more than a couple teeth with a layout change. The grip level is not going to be wildly different from one weekend to the next, so you are not going to need massive setup changes to keep the car in the sweet spot where you can put down all the power you have. Once you get everything adjusted to where you like it you are not going to make a massive adjustment to keep it there because the input variables are not changing enough to warrant massive changes (in gearing, timing, or suspension). It comes down to the law of diminishing returns which means once everything is dialed in, there isn't going to be any massive gain to be had. People often get caught up in trying to chase a better setup, but there comes a point where if the car does everything you want, you leave it alone and just drive it.
If you regularly go to several different tracks then you have the added challenge of a wider number of input variables. If one weekend you are racing a small high grip indoor track and the next weekend you go to a massive low grip outdoor track, then yeah you are going to need to make a bunch of setup changes to get everything into the window where the car is working well. If this is your situation it would probably be best to have two separate cars, lest you want to make a bunch of changes week in and week out. If all the track's where you race are similar enough to each other, and your car is in the window, there isn't going to be massive changes to keep the car optimized.
If you are constantly trying a different motor just to try it then you are just making more work for yourself for no reason. Pick something, stick with it for a whole race season, and work on getting the maximum out of it. Once you get it figured out, leave it and just work on driving at the limit.
If you only race at one track, you only have to deal with one set of variables as inputs. The track isn't going to suddenly change in physical size from one weekend to the next, so your target gearing is not going to shift by more than a couple teeth with a layout change. The grip level is not going to be wildly different from one weekend to the next, so you are not going to need massive setup changes to keep the car in the sweet spot where you can put down all the power you have. Once you get everything adjusted to where you like it you are not going to make a massive adjustment to keep it there because the input variables are not changing enough to warrant massive changes (in gearing, timing, or suspension). It comes down to the law of diminishing returns which means once everything is dialed in, there isn't going to be any massive gain to be had. People often get caught up in trying to chase a better setup, but there comes a point where if the car does everything you want, you leave it alone and just drive it.
If you regularly go to several different tracks then you have the added challenge of a wider number of input variables. If one weekend you are racing a small high grip indoor track and the next weekend you go to a massive low grip outdoor track, then yeah you are going to need to make a bunch of setup changes to get everything into the window where the car is working well. If this is your situation it would probably be best to have two separate cars, lest you want to make a bunch of changes week in and week out. If all the track's where you race are similar enough to each other, and your car is in the window, there isn't going to be massive changes to keep the car optimized.
If you are constantly trying a different motor just to try it then you are just making more work for yourself for no reason. Pick something, stick with it for a whole race season, and work on getting the maximum out of it. Once you get it figured out, leave it and just work on driving at the limit.
01-15-2019 | 08:55 PM
#24
Just to get in on the d swinging consistency conversation ...
But really I was looking at building a timing checker in a similar way. Life gets in the way and while I think it's a great idea a colleague was the brains I was relying on. While we were looking up info he found a lot of great data in the hard drive industry as disks need to rely on very precise rpm and position control. Robots somewhat but frequently used external sensors for positioning.
01-16-2019 | 08:13 AM
#25
What I am thinking of doing to accomplish this with the arduino is to read the interrupt from the sensor wire, while it is connected to an esc, simply by splitting the output of the Hall effect sensor to both. The esc controls the state of the the Hall effect sensor (on/off) and the arduino would listen to what is happening and record it via its digital input. This essentially is how a motolyzer is built.
The arduino would be configured/programmed to record data in this manner (think a spreadsheet)
Column A, Column B, Column C, column D
row 1 time stamp , interrupt time stamp, Current, Voltage
row 2 repeat all of the above
row 3 repeat again
now the trick is to use the time stamp to calculate the timing and rpm. This is what the motolyzer does.
RPM can be easily calculated post sampling, all in excel, or can be programmed with Visual Basic or java. Similar to what Bob does in RC3, also known as rc crew chief. Would just need to find what the formula would need to be and set it up in excel.
The arduino would be configured/programmed to record data in this manner (think a spreadsheet)
Column A, Column B, Column C, column D
row 1 time stamp , interrupt time stamp, Current, Voltage
row 2 repeat all of the above
row 3 repeat again
now the trick is to use the time stamp to calculate the timing and rpm. This is what the motolyzer does.
RPM can be easily calculated post sampling, all in excel, or can be programmed with Visual Basic or java. Similar to what Bob does in RC3, also known as rc crew chief. Would just need to find what the formula would need to be and set it up in excel.
For the Interrupt time stamp, wouldnt you need to know which interrupt (A,B,C) and what is that timestamp exactly? is it the time from the last interrupt(then can't you just calculate that based on the timestamp)? or does each phase get it's own counter?
01-16-2019 | 11:10 AM
#26
Tech Master
Joined: Jul 2018
Posts: 1,011
From: Florida
Just to get in on the d swinging consistency conversation ...
But really I was looking at building a timing checker in a similar way. Life gets in the way and while I think it's a great idea a colleague was the brains I was relying on. While we were looking up info he found a lot of great data in the hard drive industry as disks need to rely on very precise rpm and position control. Robots somewhat but frequently used external sensors for positioning.
But really I was looking at building a timing checker in a similar way. Life gets in the way and while I think it's a great idea a colleague was the brains I was relying on. While we were looking up info he found a lot of great data in the hard drive industry as disks need to rely on very precise rpm and position control. Robots somewhat but frequently used external sensors for positioning.
break down your track into time segments. Give the time a speed and if you can a torque or current. In the end you will want to know the average torque and rpm per lap for the track. You use this data to center power curve of the motor. Fdr, timing, and efficiency gets aligned by the first round of data.
01-16-2019 | 11:17 AM
#27
Tech Master
Joined: Jul 2018
Posts: 1,011
From: Florida
Since I have few Arduino and RC projects going on right now, might as well try this one.
For the Interrupt time stamp, wouldnt you need to know which interrupt (A,B,C) and what is that timestamp exactly? is it the time from the last interrupt(then can't you just calculate that based on the timestamp)? or does each phase get it's own counter?
For the Interrupt time stamp, wouldnt you need to know which interrupt (A,B,C) and what is that timestamp exactly? is it the time from the last interrupt(then can't you just calculate that based on the timestamp)? or does each phase get it's own counter?
you write a program. Some parts of the program are very important and need to override lower priority tasks. The program executes sequentially so you need to inerupt the program to jump to a high priority sub routine. This is an interupt.
the time stamp can be used for allot. I think in your case you will use it to compare and actual value (sensor) to another value (sensor, backemf, or methematical model.
because a longer comparison takes longer than a shorter and the values are not calculated in parallel and wires and so on take the real out of real time you need to correct the calculations for time and correct again for the time it takes you response to happen in the real world.
time is used to align what you sense with your response to the sense.
01-16-2019 | 01:33 PM
#28
you write a program. Some parts of the program are very important and need to override lower priority tasks. The program executes sequentially so you need to inerupt the program to jump to a high priority sub routine. This is an interupt.
the time stamp can be used for allot. I think in your case you will use it to compare and actual value (sensor) to another value (sensor, backemf, or methematical model.
because a longer comparison takes longer than a shorter and the values are not calculated in parallel and wires and so on take the real out of real time you need to correct the calculations for time and correct again for the time it takes you response to happen in the real world.
time is used to align what you sense with your response to the sense.
01-16-2019 | 07:44 PM
#29
Tech Master
Joined: Jul 2018
Posts: 1,011
From: Florida
An interrupt is a tool for task management. You have a program with several subroutines or tasks.I like to write a program that doesnt do anything other than decide which task to run. For example the managerial program that handles tasks is just looking for a condition (like a sensor trigger) to run the task for capturing the time stamp for phase a immediately followed by the task that is calculating the nuetral plane from back emf and field distortion. Subtract the difference and turn it into an additive current command to decrease the timer that triggers the transistor to fire the A phase.
that was an example of nested routines or tasks in a program. The routines are triggered on event (a value change in a register including sensor value)
allot of guys just run tasks based on time or let it freewheel based on processor speed. Then use interrupts. For example a task that runs every 5ms and two more that run every 10ms. This allows you to manage processor availability, efficiency and prioritization.
that was an example of nested routines or tasks in a program. The routines are triggered on event (a value change in a register including sensor value)
allot of guys just run tasks based on time or let it freewheel based on processor speed. Then use interrupts. For example a task that runs every 5ms and two more that run every 10ms. This allows you to manage processor availability, efficiency and prioritization.
01-16-2019 | 08:47 PM
#30
From what I know, the sensor board in the motor, one sensor is for phase A, a 2nd is for B, and the third is for C. The signal from each hall effect sensor travels back to the ESC or a motor analyzer. If you have a Tekin, ESC, rotate the rotor and look at the ESC while it is powered on, and it will show you if the hall effect sensors are working.. The same is on the skyRC.
Now the signals from the hall effects sensors travel to the ESC in the cable. Here is the explanation.
Pin #1 – black wire, ground potential (minus)
Pin #2 – orange wire, sensor phase C
Pin #3 – white wire, sensor phase B
Pin #4 – green wire, sensor phase A
Pin #5 – blue wire, motor temperature sensing, 10 k NTC
(other end of sensor is on ground potential, pin #1)
Pin #6 – red wire, sensors feeding, +5.0 V � 10%.
Pin #6 provides power to the hall effect sensors.
Where the arduino comes into play, is to listen to what the hall effect sensors are sending to the ESC.
Programming an interrupt is relatively straight forward, and this is what I use for my dyno to calculate RPM.
My understanding is that the same method is used to calculate timing.
So my thought with the arduino is to tap it between an ESC and the motor, by listening to the signal that is sent from the hall effect sensor to the ESC.
By listening, you can record the time in which it sends the signal and record present voltage and current at the same time.
I need to figure out what the math would be, so that I can calculate timing. This is what a motor analyzer is providing when you test. The guts of an analyzer contains an ESC, and some sort of custom built arduino to capture the data, and then it displays it. Its all math with numbers. The downfall is the limitation that you can only test timing at a low RPM, this is likely because of the limited sample memory that is on the circuit board, and the rate that it can sample at. I think the skyRC is sampling at 10 times per second. Which for accuracy purposes, its not that fast. For those who use the Tekin data logger, you will know that setting the sample rate to 0.1, you only get about 3 mins, if you set it to 0.2, about 5-6 and this is with all logging turned on, throttle, esc temp, motor temp, RPM and voltage.
Now I don't know what the latest version of the motorlyzer samples at, but when you see decimal points in the phase readings, I think it may be 50hz. This is far better than 10hz,
The benefit of arduino is that you can sample ("listen") at much higher rates, with "no minimum" amount of current providing that the sensor you use is sufficient to handle it. And you could do this while the motor is under load from lets say a flywheel. When you use the skyRC motor analyzer, you cannot have any load. This is because the ESC inside the unit can only handle so much current, including the current sensor. If you could have loaded timing testing results, then this would truly provide even better motor results.
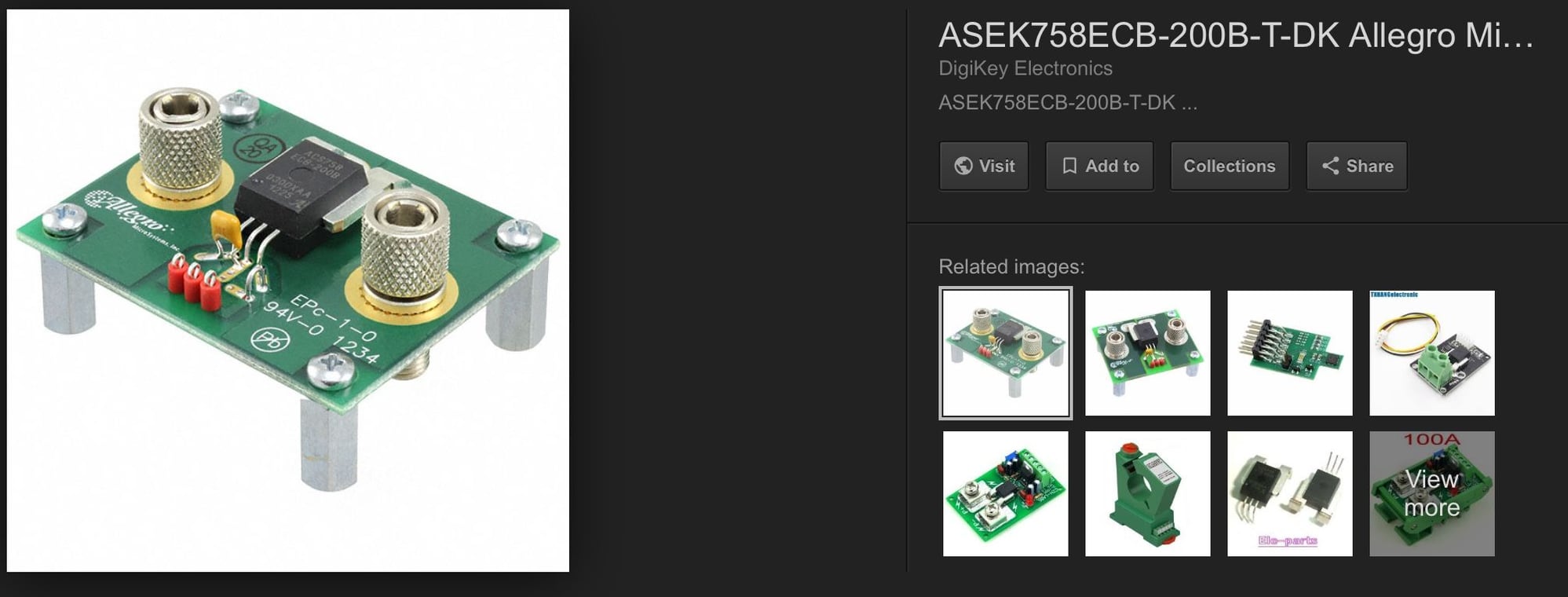
For those who are curious, I use an allegro 200U evaluation board. This is the same sensor that minipro upgraded to, originally it was a shunt.
Now the signals from the hall effects sensors travel to the ESC in the cable. Here is the explanation.
Pin #1 – black wire, ground potential (minus)
Pin #2 – orange wire, sensor phase C
Pin #3 – white wire, sensor phase B
Pin #4 – green wire, sensor phase A
Pin #5 – blue wire, motor temperature sensing, 10 k NTC
(other end of sensor is on ground potential, pin #1)
Pin #6 – red wire, sensors feeding, +5.0 V � 10%.
Pin #6 provides power to the hall effect sensors.
Where the arduino comes into play, is to listen to what the hall effect sensors are sending to the ESC.
Programming an interrupt is relatively straight forward, and this is what I use for my dyno to calculate RPM.
My understanding is that the same method is used to calculate timing.
So my thought with the arduino is to tap it between an ESC and the motor, by listening to the signal that is sent from the hall effect sensor to the ESC.
By listening, you can record the time in which it sends the signal and record present voltage and current at the same time.
I need to figure out what the math would be, so that I can calculate timing. This is what a motor analyzer is providing when you test. The guts of an analyzer contains an ESC, and some sort of custom built arduino to capture the data, and then it displays it. Its all math with numbers. The downfall is the limitation that you can only test timing at a low RPM, this is likely because of the limited sample memory that is on the circuit board, and the rate that it can sample at. I think the skyRC is sampling at 10 times per second. Which for accuracy purposes, its not that fast. For those who use the Tekin data logger, you will know that setting the sample rate to 0.1, you only get about 3 mins, if you set it to 0.2, about 5-6 and this is with all logging turned on, throttle, esc temp, motor temp, RPM and voltage.
Now I don't know what the latest version of the motorlyzer samples at, but when you see decimal points in the phase readings, I think it may be 50hz. This is far better than 10hz,
The benefit of arduino is that you can sample ("listen") at much higher rates, with "no minimum" amount of current providing that the sensor you use is sufficient to handle it. And you could do this while the motor is under load from lets say a flywheel. When you use the skyRC motor analyzer, you cannot have any load. This is because the ESC inside the unit can only handle so much current, including the current sensor. If you could have loaded timing testing results, then this would truly provide even better motor results.
For those who are curious, I use an allegro 200U evaluation board. This is the same sensor that minipro upgraded to, originally it was a shunt.