


 4Likes
4LikesMiborg Rzeppa-style driveshafts
 07-21-2019, 07:27 AM
07-21-2019, 07:27 AM
#1
Has anyone tried these driveshafts?
https://miborg-rc.com/epages/box1912...%201917%20B%22
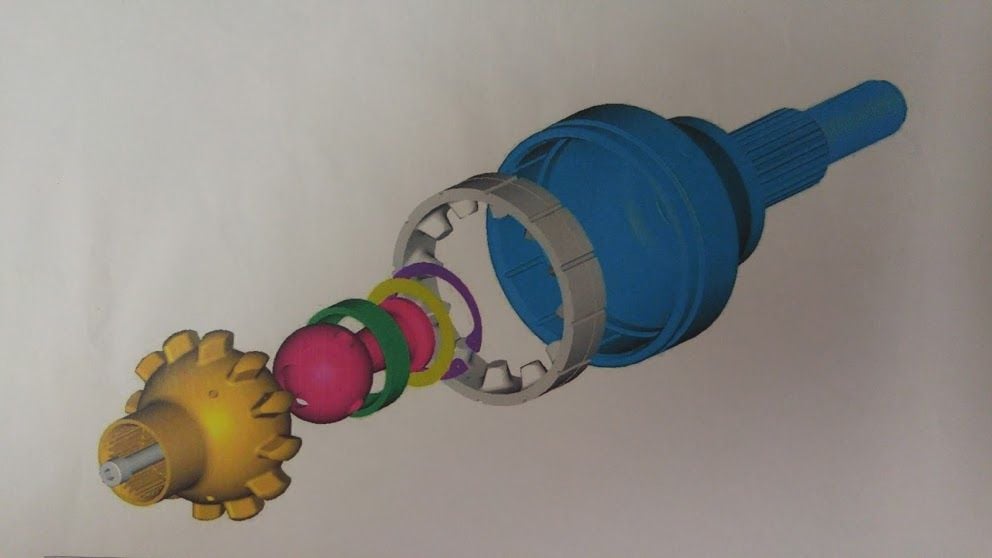
They seem quite pricey. Wonder how a Rzeppa joint (as used on full size cars) compares to a DCJ?
https://miborg-rc.com/epages/box1912...%201917%20B%22
They seem quite pricey. Wonder how a Rzeppa joint (as used on full size cars) compares to a DCJ?
 07-21-2019, 08:00 AM
07-21-2019, 08:00 AM
#2

Has anyone tried these driveshafts?
https://miborg-rc.com/epages/box1912...%201917%20B%22
They seem quite pricey. Wonder how a Rzeppa joint (as used on full size cars) compares to a DCJ?
https://miborg-rc.com/epages/box1912...%201917%20B%22
They seem quite pricey. Wonder how a Rzeppa joint (as used on full size cars) compares to a DCJ?
 well if they last longer then they are for sure worth it
07-21-2019, 03:14 PM
well if they last longer then they are for sure worth it
07-21-2019, 03:14 PM
#4
07-22-2019, 05:09 AM
#5
It says on the website: do not use grease or oil.!?
07-22-2019, 05:26 AM
#6
 07-22-2019, 07:55 AM
07-22-2019, 07:55 AM
#8
I think the RC world needs this. The design would be ideal for miniature CVJ's. So simple.
07-22-2019, 08:44 AM
#10
 07-22-2019, 09:19 AM
07-22-2019, 09:19 AM
#11
I've been researching and studying CVJ's for about 2+ decades trying to find a suitable design for R/C. I even designed a few of my own but nothing comes close to the simplicity of the Torvec.
07-22-2019, 01:35 PM
#12
There is no centering device to keep the balls on the homokinetic plane so that explains the warning about using grease or oil. The joint relies on friction in order to maintain a constant velocity performance. There is a lot of load bearing sliding friction with this design but it could still be better than a double Cardan.
07-22-2019, 03:29 PM
#13
There is no centering device to keep the balls on the homokinetic plane so that explains the warning about using grease or oil. The joint relies on friction in order to maintain a constant velocity performance. There is a lot of load bearing sliding friction with this design but it could still be better than a double Cardan.
07-22-2019, 08:27 PM
#14
Exactly, but I'd still like to try them. Surely they've been tested by someone?
07-23-2019, 05:42 AM
#15
This is a pretty cool idea, I think there would be a few main concerns when scaling it down for RC applications.
What is the actual advantage to any of the above ideas? DO they weigh less, are they more efficient? Why not make some similar parts for a DJC and see if we can improve upon them?
The first is the angle in which we need to work at speed, do any of the above allow for the same "angles" as a DJC or similar?
The production costs at least initially are probably going to be much much higher than a typical DJC.
What is the actual advantage to any of the above ideas? DO they weigh less, are they more efficient? Why not make some similar parts for a DJC and see if we can improve upon them?
The first is the angle in which we need to work at speed, do any of the above allow for the same "angles" as a DJC or similar?
The production costs at least initially are probably going to be much much higher than a typical DJC.