


Getting an esc to do reverse from a microcontroler
 07-22-2013 | 01:30 AM
07-22-2013 | 01:30 AM
#1
Thread Starter
Tech Rookie
Joined: Jul 2013
Posts: 3
HI
i'm trying to use a microcontroler (arduino) to control an ESC (the Dynamite tazer 15T)
i am giving it a PWM signal sweeping from 1 to 255 (when i hook up a servo it does a 180 back and forth) but i only seem to be getting forward
can anyone tell me what signal i should send it to get it to go reverse??
any suggestions welcome
Kind regards
Wouter
i'm trying to use a microcontroler (arduino) to control an ESC (the Dynamite tazer 15T)
i am giving it a PWM signal sweeping from 1 to 255 (when i hook up a servo it does a 180 back and forth) but i only seem to be getting forward
can anyone tell me what signal i should send it to get it to go reverse??
any suggestions welcome
Kind regards
Wouter
Last edited by wouter; 07-22-2013 at 04:07 AM.
 07-23-2013 | 01:07 AM
07-23-2013 | 01:07 AM
#3
Thread Starter
Tech Rookie
Joined: Jul 2013
Posts: 3
I tried to last night, hooked up a pot to do so, but couldn't get it to work it does stay still for about 50% of the travel on the pot
i looked at the manuel for this esc and it mentions a programing button, but i dont see a buton annywhere , just an off-on switch and 2 leds, onbe red and one green, the red one had a icn of a shield next to it.
i looked at the manuel for this esc and it mentions a programing button, but i dont see a buton annywhere , just an off-on switch and 2 leds, onbe red and one green, the red one had a icn of a shield next to it.
07-23-2013 | 04:05 AM
#4
Here is the manual for the 15T WP:
http://www.horizonhobby.com/pdf/DYN4925WP_Manual.pdf
The manual has absolutely no instructions for calibration! However, the 12T WP manual does, so you might try that:
http://www.horizonhobby.com/pdf/DYN4927WP_Manual.pdf
07-23-2013 | 08:27 AM
#5
Tech Fanatic
iTrader: (13)
Joined: Oct 2011
Posts: 875
From: Round Lake, IL
If I'm remembering correctly, isn't Neutral Throttle actually 50% duty cycle, forward is 51-100% and reverse is 49-0%? If your ESC is auto-calibrating (whatever duty cycle it sees on boot = neutral) this could be your issue.
07-23-2013 | 09:25 AM
#6
That's for old-school equipment, not the latest, proprietary "high-rate" stuff.
07-24-2013 | 04:07 PM
#7
Tech Champion

Joined: Oct 2007
Posts: 7,342
+1 Pretty much what I have seen including some variance on neutral. Many of the newer transmitters have a shorter period (aka frame rate on some radios) that requires digital or at least modern servos. Helps increase responsiveness and reduce latency.
Here is a typical graphical representation of the traditional signal (of course in practice it won't be this square):
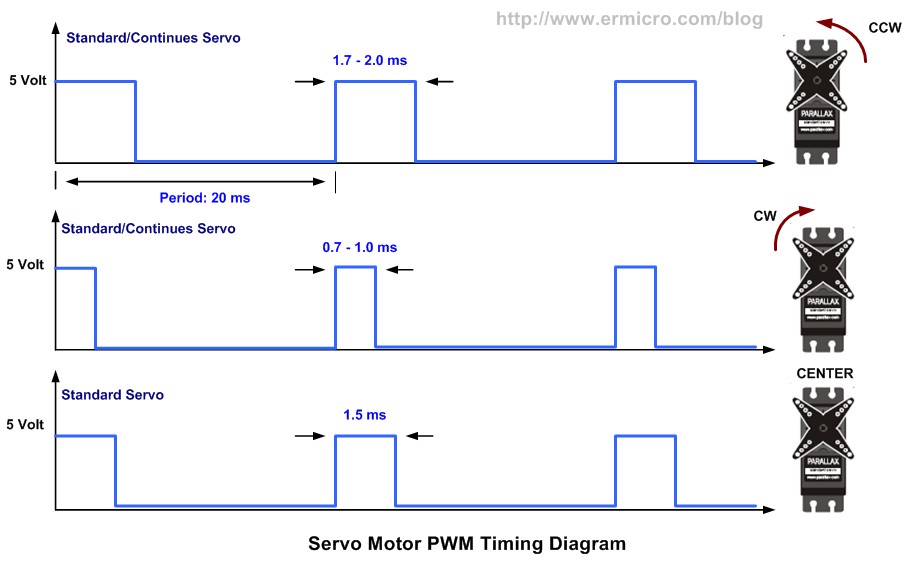
Here is a typical graphical representation of the traditional signal (of course in practice it won't be this square):
 02-28-2014 | 09:00 PM
02-28-2014 | 09:00 PM
#9
Tech Rookie
Joined: Feb 2014
Posts: 6
From: Houston
I see that you were working on this.
With mine, I can not get it to do reverse after doing forward movement.
I've tried many different versions of the code following the forward movement. I had similar code work in the past and lost it.
Can you help me?
CODE: (with attempts commented out)
steeringPin.write(Left);
delay(1000);
//throttlePin.write(Stop);
// delay(5000);
throttlePin.writeMicroseconds(2000);
throttlePin.write(RVS);
//throttlePin.writeMicroseconds(2000);
throttlePin.write(Stop);
delay(2500);
throttlePin.write(RVS);
delay(150);
throttlePin.writeMicroseconds(0);
steeringPin.write(Strait);
delay(1000);
With mine, I can not get it to do reverse after doing forward movement.
I've tried many different versions of the code following the forward movement. I had similar code work in the past and lost it.
Can you help me?
CODE: (with attempts commented out)
steeringPin.write(Left);
delay(1000);
//throttlePin.write(Stop);
// delay(5000);
throttlePin.writeMicroseconds(2000);
throttlePin.write(RVS);
//throttlePin.writeMicroseconds(2000);
throttlePin.write(Stop);
delay(2500);
throttlePin.write(RVS);
delay(150);
throttlePin.writeMicroseconds(0);
steeringPin.write(Strait);
delay(1000);
Currently Active Users Viewing This Thread: 1 (0 members and 1 guests)
