Couple of Q�s
Playing around with a drift car and have a gyro in it now two things
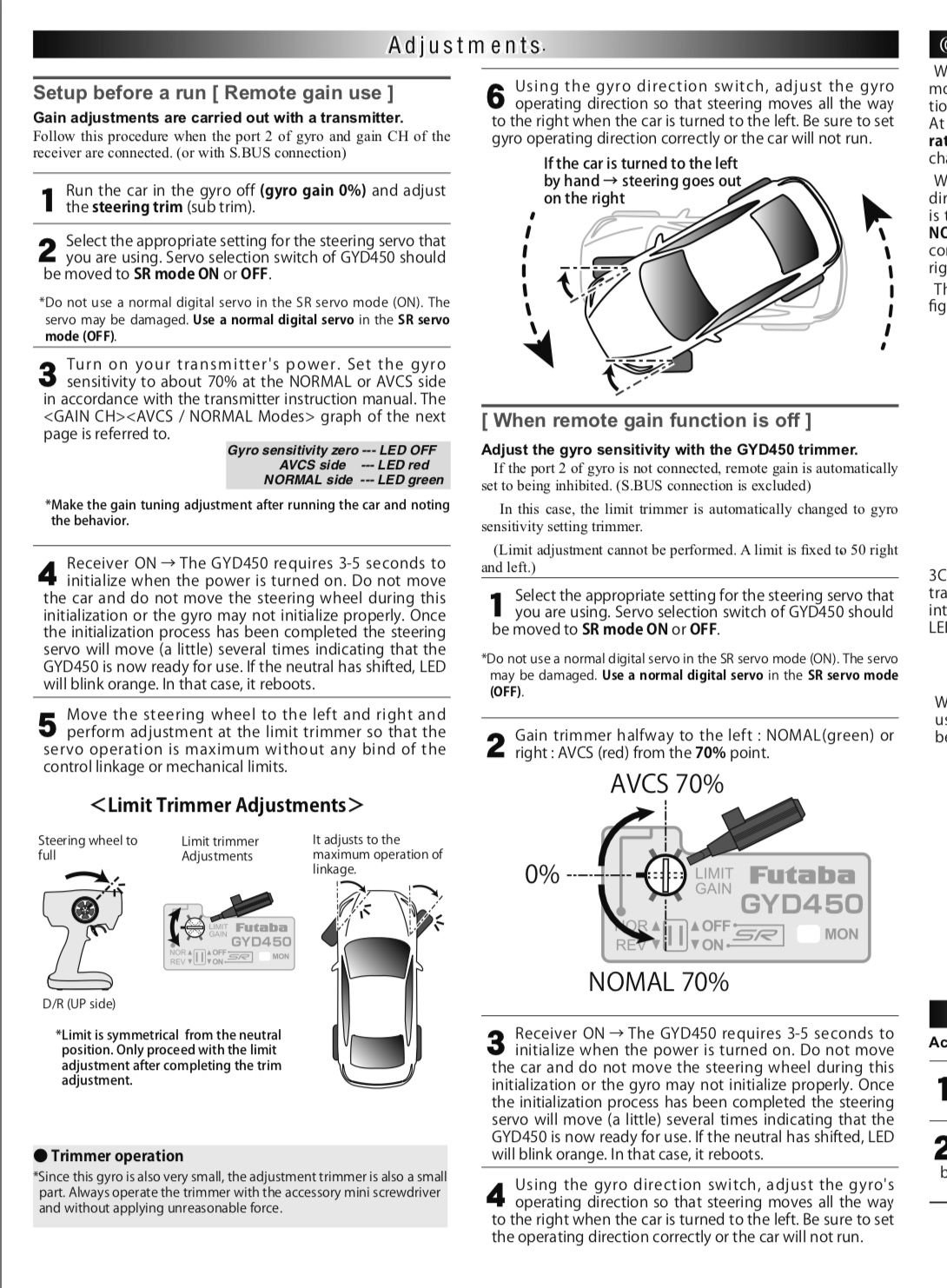
1) the Gyro is a Futaba GYC and when you connect it up with remote gain the trim on the gyro becomes servo limit trim (without remote gain it defaults to 50%) now if this controls the servo limits does that mean this is now my end point control rather then on my 7PX (which I�ve set the endpoints and prefer the accuracy of this method rather then a little trim)
2) now I�m running a S.Bus receiver and Gyro but a non S.Bus servo can I config the Rx and gyro in S.bus or would I need an S.bus servo as well?
Heres the manual
https://www.rc.futaba.co.jp/english/...l/gyd450_e.pdf
Hope that makes sense?