On the video the car looks blistering fast. I for myself felt that there was too much weight in front. I couldn't attack the corners like I wanted to.
Not sure what happened then

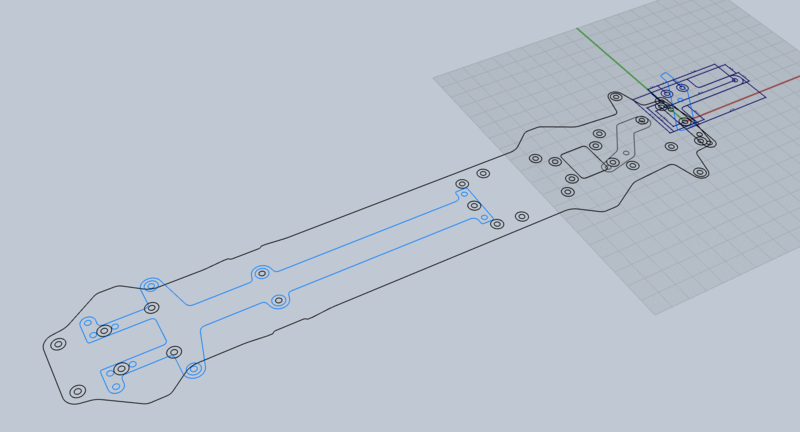
Some day I found myself checking the net for tuning chassis and found some from 3racing and Yeah racing. The way these where designed, showed that you could replace the tub chassis with a carbon plate... This was too much for my brain to resist the challenge. Soon I was sitting in front of my laptop measuring, drawing, creating, checking other FF chassis. I built mock up chassis from plastic sheets, searched and ordered parts. This was the 3D-result:
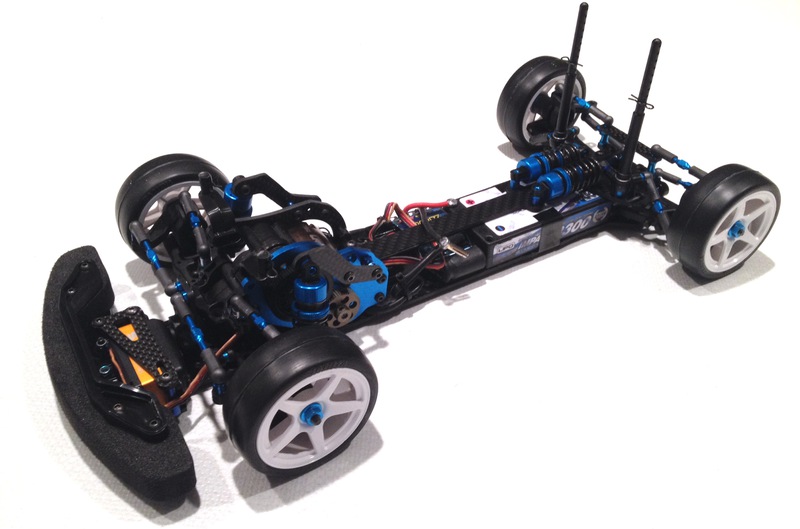
Virtual drawings are nice, but you need a pro to make actual parts from this. So who is topping the time sheets in his class at nearly every ETS event and drives his own chassis on his Tamiya cars... yes, Christian Donath was my man of choice. Lucky as I am, I know him personally from many training days in south Germany. I contacted him and he was super nice. Around one week later I had all parts in the mail. The quality is still impressing. This is what I could hold in my hands after an troublefree assembly:

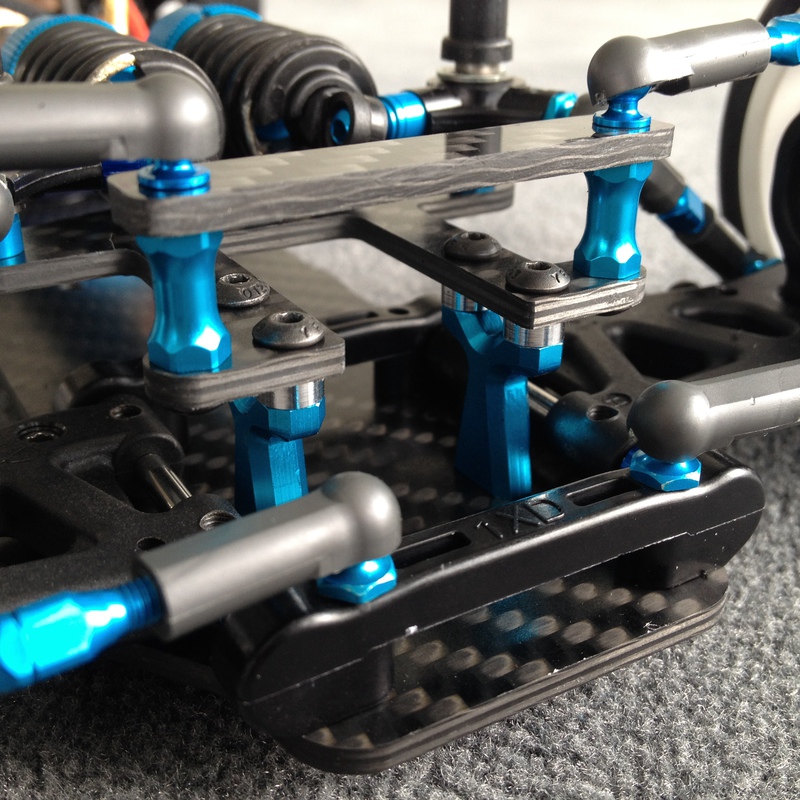
"I went for lay down shocks, because I am just a big fan of it. Also it works pretty smooth with ball bearings and decent shimming in the rocker arms. The rocker arms and shock ends are attached to the top deck with counter sunk screws to have a low topdeck and to give the battery the opportunity to slide in sideways. As mentioned above the topdeck in the rear is attached to the chassis by Exotek F1 servo mounts. This is a low price, lightweight and for me practical solution as I had them laying around from my F1R2. So the topdeck is a multifunctional part including rocker-, shockposition and defining the camber links. I use a 1/12 sized 2s shorty lipo so my topdeck is just 19mm above the chassis plate. This would create arkward angles for the rear camber links. By using Tamiya 9805974 TB-02R posts I raised the ballstud position and strengthened the construction with a small carbon bridge connecting the ballstuds. Taking advantage of what is given harware wise, I used the upper open thread of the rocker nuts to attach the rear body posts (pan car style). Optional: The upside thread of the rear-rear-suspension block (1XD) is used for the active rear suspension style toe link ballstud. This way I could avoid buying Tamiya suspension blocks while having the advantage of a free toe adjustment. Depending on the rear arms used it is maybe necessary to drill holes for the rockerarm link and/or anti-roll-bar-mount.
These are all "secrets" in the rear. A lot of text, but mostly plug and play in the end."


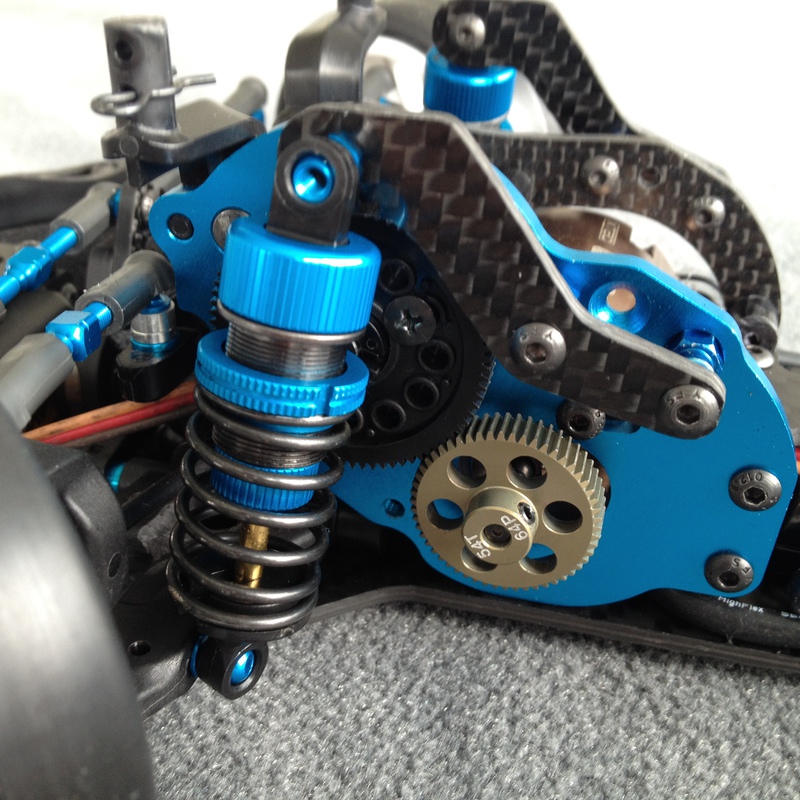
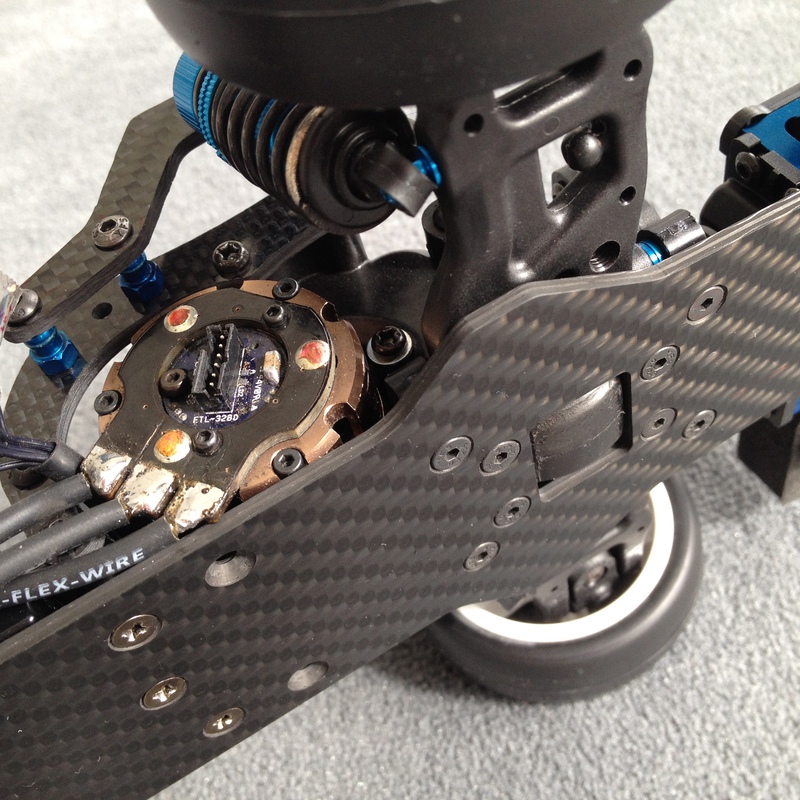
"The layout of the lower chassis plate allows for two motor positions: The "traditional" motor position and the front middle motor position (as shown here). If you go for the "traditional" position the standard steering layout can be used. The front shocks will have a lay down position.
The front middle motor layout does not have enough space for that. The shocks are in an standing position and attached to the aluminum motor plate and the motor mount on the left side via small carbon parts. The front end of the topdeck has three holes to attach it to the M1-part (51422 M-parts from your FF03). This part has to be optimized to make space. In the end I used the outer two hole for attachment only. Also this part has to be shimmed out correctly for a straight attachment to the lower chassis as the bumper now doesn't fill the space in between (see FF03 manual)."


The additonal parts needed:
1x Xray 306200-K - T4 2015 Alu Servo Mount - BLACK (2)
1x Xray servo saver #372503
1x Exotek 1495 F1 servo horn plate
2x Exotek 1397 F1R2 Servo mounts (used as rear bulkheads)
1x Tamiya 9805974 TB-02R posts 10.5mm
1x Tamiya 51457 TA-06 N-parts (rocker arm)
These parts plus my chassis parts will be enough to make a full conversion. Plus a lot of M3 shims.
In this conversion process the suspension parts were changed to Xray parts which I had laying around as spare for my daily T4'17.
"Now a mod for the hardcore racer (optional): After first installing the gearbox on the prototype (flat) chassis I discovered that the motor hovered nearly 3mm above the chassis Not sure why Tamiya constructed it this way, but I couldn't let this happen. The easiest way to reduce the height is to precisely cut away the lower tabs of the gearbox. And that is what I did. If you do it take your time and check that the cut is straight and/or file away the last half millimeter to make it perfect. You can do it without being a pro just take time and check several times. The carbon chassis already features a large enough cut out for the lower differential housing."

The position change of the motor was not as easy as it looks. Because I turned around the whole gearbox, the motor rotation needed to be changed. This was not as easy as thought. I quote what I wrote in the FF03-Thread:
"Ok, now there is one thing, which nearly killed this project for me. And I thought I could not come up with a solution. But looking at this problem now, it wasn`t a problem at all and even gave me a deeper understanding about sensored brushless motors. What am I blabbering about ( ) is that with the front-middle-motor-configuration we turned the motor around 180�. So it turns in the wrong direction. For unsensored and brushed motors this is not a problem. Just switch plus and minus cables or A & C. But a sensored motor will not turn with just changing cable position or the esc will even tell you there is a problem and do nothing. There are three steps to make a sensored brushless motor of any make switch its rotating direction:
1. Switch cable position A & C on the motor side
2. Switch sensor cable pin position: pin #2 with pin #4 on the motor side. Don't be afraid here. Just count the wires from left to right. If you did it wrong nothing will happen. Then bring it back in the original order and just count from the other side and voil� it works! Just don't change the most outter pins: pin #1 with pin #6 that is plus and minus
Here is an overview:
Pin#1 - ground potential (minus)
Pin#2 - sensor phase C
Pin#3 - sensor phase B
Pin#4 - sensor phase A
Pin#5 - motor temperature sensing
Pin#6 - sensors feeding +5.0V"
"Phew, I had a hard time finding, adjusting and installing the timing and timing insert. It was also my first time to disassemble a brushlessmotor completly. My impression from last time was that the timing was zero or even negative. The motor got hot without delivering good output.
To change that I had to add circular movement for the timing insert. Therefore I grind away the material from the endbell (the bases that connect inner and outer bell). The endbell had to come off to do it right. Then I reassembled everything just to realize it won't move more than before It took around fifteen minutes before I discovered little plates sticking out beneath of the windings which prevent the insert from turning into my wanted position. So I had to do it all over again. Fortunately these plates were made of plastic and not iron. Now the motor turns faster and stronger. The insert has a position 90* in rotation direction in comparison to the original position. Which is something I do not understand as the theory suggests an anti rotation direction... My theory would have been to turn the insert 60* clockwise to get the wanted 30* of timing for the changed rotation, but this and other positions just do not work. The motor does not turn or sounds terrible or turns in the wrong direction if the timing insert is in any other than the above mentioned position... So that is why it took so long (three evenings)."
So this was quite a learning curve

Now the motor runs smooth and strong!