


 51Likes
51Likes17.5 Motor Power Output from Dyno
 02-23-2023, 08:15 AM
02-23-2023, 08:15 AM
#31

Q1 + Q2. Mainly peak power, as the more power you have, the more rpm and/or torque you can get out of the motor. Example, if motor A has 200 watts and motor B has 300 watts, then you can set the pinion/spur gearing such that motor B has the same rpm as motor A but with more torque, or vice versa. However, there are 2 situations where this is not what you want. One is this: Timing A might give you more peak power, but timing B gives you more power over the rpm range than timing A. You would then need to make the judgement of either: do you want more power at one point, or over the rpm band. The mathematical way (and the way I think is the best) is to integrate power with respect to rpm over a given rpm range. Then that integration would show which one has more power total over that rpm range. That is how you 'should' determine timing when looking at power data if that is your only input, but just stating the peak power is easier than doing calculus/pre-calculus and gets you most of the way there. The integration would be also inconsistent as the dyno picks up rpm data at different rpm for each run because of the 10Hz refresh rate, so your integration range would be inconsistent between runs.
Q3. Now this is the interesting part. Out of the top 3, the Slot Machine seems to have the most consistent high power outputs, with the HW and Team Powers having similar singular peaks, but not as much power in the 2nd and 3rd runs. BUT, the HW pulls less current at that peak power than the slot machine (I think 5 amps less but I don't remember exactly). And this is where judgement would come into play. For me this is how I would think about it (you needs/requirements/constraints/circumstances may be different so be aware of that). For 17.5 2wd buggy, I would run the slot machine. It has consistently higher power than the other motors, and I can deal with the higher amp draw as I run on astro, so I can get away with running a heavier pack with more capacity. I also like how it drives better with it, so the amp draw concern is not something I would be concerned about. Also since it is 2wd, I can run a fan on the waterfall, poking through the body to apply direct cooling to the motor with the fan directly soldered to the esc posts. So the heat concern is also not something I would be concerned about. So with the 2 possible downsides mitigated, the only choice is to go with the most powerful motor.
For 13.5 4wd buggy, that gets interesting. (NOTE: I am assuming that these data trends from the 17.5 motors carry over to the 13.5 motors for this next part). In 4wd, I mainly run an lcg battery, so the amp draw concern is definitely there, as well as the heat concern because the vehicle is heavier, has more bearings/driveshafts inducing friction, more traction, and not real good way of cooling the motor. I was running a fan directly soldered to the esc posts with an arndcraft fan mount with a hole right above the fan at the NCTS 4 summer race @ RC Madness, and it was overheating any time the ambient temperature went above like 80 to 85F. Because of these 2 concerns, I would run the HW, sacrificing some peak power but gaining more efficiency in the process to use throughout the run. Again, the 13.5 case is assuming A LOT of things to hold true, but that is what I would spend my money on. I think the HW has higher peak efficiency numbers as well, though I would have to double check that.
I think Trinity had a video on YouTube in which they said 50* on a motorlyser is the place to start tuning the motor. Slot Machine Tech with The Champ Brennan Schimmel or New Trinity Slot Machine Overview has it.
Q3. Now this is the interesting part. Out of the top 3, the Slot Machine seems to have the most consistent high power outputs, with the HW and Team Powers having similar singular peaks, but not as much power in the 2nd and 3rd runs. BUT, the HW pulls less current at that peak power than the slot machine (I think 5 amps less but I don't remember exactly). And this is where judgement would come into play. For me this is how I would think about it (you needs/requirements/constraints/circumstances may be different so be aware of that). For 17.5 2wd buggy, I would run the slot machine. It has consistently higher power than the other motors, and I can deal with the higher amp draw as I run on astro, so I can get away with running a heavier pack with more capacity. I also like how it drives better with it, so the amp draw concern is not something I would be concerned about. Also since it is 2wd, I can run a fan on the waterfall, poking through the body to apply direct cooling to the motor with the fan directly soldered to the esc posts. So the heat concern is also not something I would be concerned about. So with the 2 possible downsides mitigated, the only choice is to go with the most powerful motor.
For 13.5 4wd buggy, that gets interesting. (NOTE: I am assuming that these data trends from the 17.5 motors carry over to the 13.5 motors for this next part). In 4wd, I mainly run an lcg battery, so the amp draw concern is definitely there, as well as the heat concern because the vehicle is heavier, has more bearings/driveshafts inducing friction, more traction, and not real good way of cooling the motor. I was running a fan directly soldered to the esc posts with an arndcraft fan mount with a hole right above the fan at the NCTS 4 summer race @ RC Madness, and it was overheating any time the ambient temperature went above like 80 to 85F. Because of these 2 concerns, I would run the HW, sacrificing some peak power but gaining more efficiency in the process to use throughout the run. Again, the 13.5 case is assuming A LOT of things to hold true, but that is what I would spend my money on. I think the HW has higher peak efficiency numbers as well, though I would have to double check that.
I think Trinity had a video on YouTube in which they said 50* on a motorlyser is the place to start tuning the motor. Slot Machine Tech with The Champ Brennan Schimmel or New Trinity Slot Machine Overview has it.
 02-24-2023, 08:04 AM
02-24-2023, 08:04 AM
#32
Another question about the dyno in particular. Do you think the load that is put on the motor is too high? What does that do to the numbers generated? Are they still usable?
I have an R1 Wurks digital 3 esc on one of my cars with a 21.5. I remember using the data logging feature on it and the max amps I pulled from a dead stop was around 40 amps (4wd TC black carpet). I am not sure if this is because the sampling rate is too low or if the dyno gives higher numbers because of the load. But, I did purchase one of these dyno's, hopefully it will be here next week and I can use my digital 3 esc with data logging and see how the amp draw looks compared to what the dyno says. Regardless it should be fun testing all my motors.
I have an R1 Wurks digital 3 esc on one of my cars with a 21.5. I remember using the data logging feature on it and the max amps I pulled from a dead stop was around 40 amps (4wd TC black carpet). I am not sure if this is because the sampling rate is too low or if the dyno gives higher numbers because of the load. But, I did purchase one of these dyno's, hopefully it will be here next week and I can use my digital 3 esc with data logging and see how the amp draw looks compared to what the dyno says. Regardless it should be fun testing all my motors.
02-24-2023, 07:25 PM
#33
It won't allow you to do anything? That's weird. In the software, there should be a watts-in logging section, a watts-out logging section, a kV section and a torque section. That's assuming they included those. It might take a bit of digging around and futzing with setup to find them.
Now, if they are in there, you can plot the raw numbers on an XY graph, similar to how you have done it already. However, instead of a full dump like you have done, you should set it up with watts-in on the X axis and watts-out on a Y axis to show efficiency for all motors. You can also plot watts-out on the X axis and torque on the Y axis to show a power curve for the watts consumed by the motor. If you plot HP and torque on the X axis and watts-out on the Y axis, you'll be able to show where the sweet spot for each motor lies, and find the most ideal timing on each motor.
If they're not and MiniPro will not let you use useful data, it's possible to take the datapoints into excel and create your own plots.
Here's the thing with just taking X watts and claiming it's "the best". You can easily stall the motor out, get a higher watt number from X motor vs Y motor and call it a day. But nobody else knows if the motor is using the power effectively. We need to see watts used with torque. So that way, we know where the motor stands up to its competition.
Now, if they are in there, you can plot the raw numbers on an XY graph, similar to how you have done it already. However, instead of a full dump like you have done, you should set it up with watts-in on the X axis and watts-out on a Y axis to show efficiency for all motors. You can also plot watts-out on the X axis and torque on the Y axis to show a power curve for the watts consumed by the motor. If you plot HP and torque on the X axis and watts-out on the Y axis, you'll be able to show where the sweet spot for each motor lies, and find the most ideal timing on each motor.
If they're not and MiniPro will not let you use useful data, it's possible to take the datapoints into excel and create your own plots.
Here's the thing with just taking X watts and claiming it's "the best". You can easily stall the motor out, get a higher watt number from X motor vs Y motor and call it a day. But nobody else knows if the motor is using the power effectively. We need to see watts used with torque. So that way, we know where the motor stands up to its competition.
If I stall out the motor, then it would produce no power. Power is the amount of work done per unit of time, and if the motor doesn't spin, it does no work, and makes no power. A motor that creates the most power (in this case mechanical watts) is by definition making power effectively. It just might not make it efficiently.
 02-24-2023, 07:39 PM
02-24-2023, 07:39 PM
#34
A 21.5 may have a different sweet spot than the 17.5. I don't think the load is too high, the flywheel was meant for 17.5 motors, per MiniPro directly. If the inertia of the flywheel is properly inputted and used, then there would be no difference. The MiniPro dyno is an inertia dyno, so to calculate power it (probably) uses the following equation: T=I*A, where torque equals moment of inertia times the angular acceleration. The angular acceleration is gathered from the encoder. The inertia is tricky, and you would have to calculate it by hand (complicated the more nonuniform the flywheel shape is to include all elements) or in the CAD software (probably the way it was done). I would assume MiniPro did their due diligence and designed this properly. The torque is multiplied by the rpm (not rpm actually, but radians per second, which is the way I did it when I built my own dyno before buying the minipro).
02-27-2023, 06:32 PM
#35
When I got my minipro, I worked a lot with Jose, the guy behind the dyno. I was getting some unusual results and we spent weeks trying different things. It ultimately lead to him changing to the sticker on the flywheel from just a piece of electrical tape that was what he originally used. But during these tests, I manually calculated torque, power, etc using the equations you can find for calculating inertia of a flywheel. They were very close and since I was excluding the flywheel posts, knew the software was outputting the correct numbers.
As Stephen said, work is work, so if you tested the same motor under same conditions with 2 different flywheels, you should get the same result. The only problems I still have is belt slippage. I've 3d printed some parts to add bearings above and below the belt to keep it somewhat tight to the motor sprocket. I have researched buying larger sprockets for the motor side, but haven't found anything that would be a easy fix.
I've found that motors of the same brand and model, but 21.5 vs 17.5 prefer the same timing to maximize peak power.
As Stephen said, work is work, so if you tested the same motor under same conditions with 2 different flywheels, you should get the same result. The only problems I still have is belt slippage. I've 3d printed some parts to add bearings above and below the belt to keep it somewhat tight to the motor sprocket. I have researched buying larger sprockets for the motor side, but haven't found anything that would be a easy fix.
I've found that motors of the same brand and model, but 21.5 vs 17.5 prefer the same timing to maximize peak power.
03-08-2023, 10:10 AM
#36
Q1 + Q2. Mainly peak power, as the more power you have, the more rpm and/or torque you can get out of the motor. Example, if motor A has 200 watts and motor B has 300 watts, then you can set the pinion/spur gearing such that motor B has the same rpm as motor A but with more torque, or vice versa. However, there are 2 situations where this is not what you want. One is this: Timing A might give you more peak power, but timing B gives you more power over the rpm range than timing A. You would then need to make the judgement of either: do you want more power at one point, or over the rpm band. The mathematical way (and the way I think is the best) is to integrate power with respect to rpm over a given rpm range. Then that integration would show which one has more power total over that rpm range. That is how you 'should' determine timing when looking at power data if that is your only input, but just stating the peak power is easier than doing calculus/pre-calculus and gets you most of the way there. The integration would be also inconsistent as the dyno picks up rpm data at different rpm for each run because of the 10Hz refresh rate, so your integration range would be inconsistent between runs.
Q3. Now this is the interesting part. Out of the top 3, the Slot Machine seems to have the most consistent high power outputs, with the HW and Team Powers having similar singular peaks, but not as much power in the 2nd and 3rd runs. BUT, the HW pulls less current at that peak power than the slot machine (I think 5 amps less but I don't remember exactly). And this is where judgement would come into play. For me this is how I would think about it (you needs/requirements/constraints/circumstances may be different so be aware of that). For 17.5 2wd buggy, I would run the slot machine. It has consistently higher power than the other motors, and I can deal with the higher amp draw as I run on astro, so I can get away with running a heavier pack with more capacity. I also like how it drives better with it, so the amp draw concern is not something I would be concerned about. Also since it is 2wd, I can run a fan on the waterfall, poking through the body to apply direct cooling to the motor with the fan directly soldered to the esc posts. So the heat concern is also not something I would be concerned about. So with the 2 possible downsides mitigated, the only choice is to go with the most powerful motor.
For 13.5 4wd buggy, that gets interesting. (NOTE: I am assuming that these data trends from the 17.5 motors carry over to the 13.5 motors for this next part). In 4wd, I mainly run an lcg battery, so the amp draw concern is definitely there, as well as the heat concern because the vehicle is heavier, has more bearings/driveshafts inducing friction, more traction, and not real good way of cooling the motor. I was running a fan directly soldered to the esc posts with an arndcraft fan mount with a hole right above the fan at the NCTS 4 summer race @ RC Madness, and it was overheating any time the ambient temperature went above like 80 to 85F. Because of these 2 concerns, I would run the HW, sacrificing some peak power but gaining more efficiency in the process to use throughout the run. Again, the 13.5 case is assuming A LOT of things to hold true, but that is what I would spend my money on. I think the HW has higher peak efficiency numbers as well, though I would have to double check that.
I think Trinity had a video on YouTube in which they said 50* on a motorlyser is the place to start tuning the motor. Slot Machine Tech with The Champ Brennan Schimmel or New Trinity Slot Machine Overview has it.
Q3. Now this is the interesting part. Out of the top 3, the Slot Machine seems to have the most consistent high power outputs, with the HW and Team Powers having similar singular peaks, but not as much power in the 2nd and 3rd runs. BUT, the HW pulls less current at that peak power than the slot machine (I think 5 amps less but I don't remember exactly). And this is where judgement would come into play. For me this is how I would think about it (you needs/requirements/constraints/circumstances may be different so be aware of that). For 17.5 2wd buggy, I would run the slot machine. It has consistently higher power than the other motors, and I can deal with the higher amp draw as I run on astro, so I can get away with running a heavier pack with more capacity. I also like how it drives better with it, so the amp draw concern is not something I would be concerned about. Also since it is 2wd, I can run a fan on the waterfall, poking through the body to apply direct cooling to the motor with the fan directly soldered to the esc posts. So the heat concern is also not something I would be concerned about. So with the 2 possible downsides mitigated, the only choice is to go with the most powerful motor.
For 13.5 4wd buggy, that gets interesting. (NOTE: I am assuming that these data trends from the 17.5 motors carry over to the 13.5 motors for this next part). In 4wd, I mainly run an lcg battery, so the amp draw concern is definitely there, as well as the heat concern because the vehicle is heavier, has more bearings/driveshafts inducing friction, more traction, and not real good way of cooling the motor. I was running a fan directly soldered to the esc posts with an arndcraft fan mount with a hole right above the fan at the NCTS 4 summer race @ RC Madness, and it was overheating any time the ambient temperature went above like 80 to 85F. Because of these 2 concerns, I would run the HW, sacrificing some peak power but gaining more efficiency in the process to use throughout the run. Again, the 13.5 case is assuming A LOT of things to hold true, but that is what I would spend my money on. I think the HW has higher peak efficiency numbers as well, though I would have to double check that.
I think Trinity had a video on YouTube in which they said 50* on a motorlyser is the place to start tuning the motor. Slot Machine Tech with The Champ Brennan Schimmel or New Trinity Slot Machine Overview has it.


 03-08-2023, 10:27 AM
03-08-2023, 10:27 AM
#37
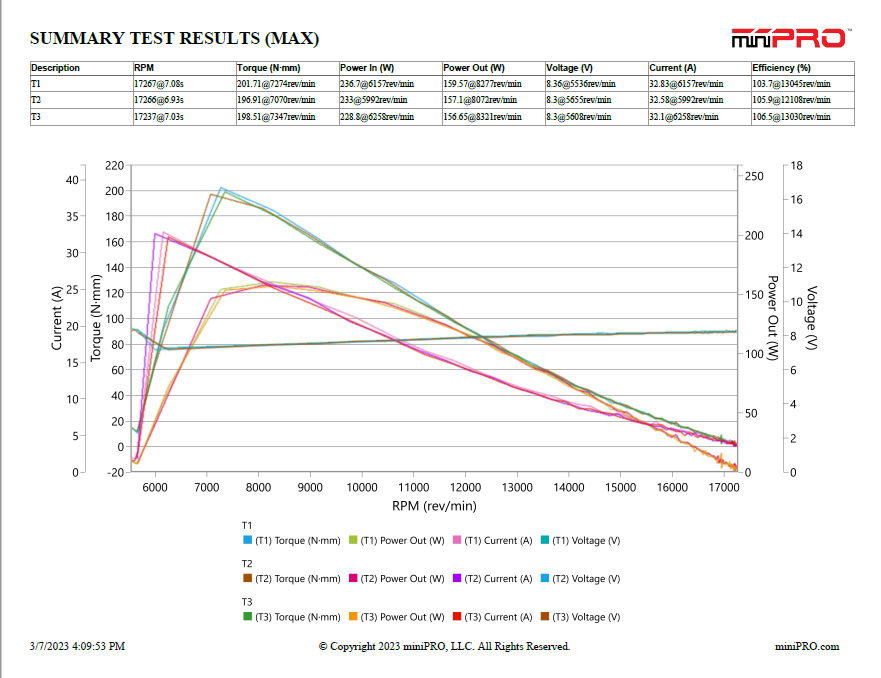
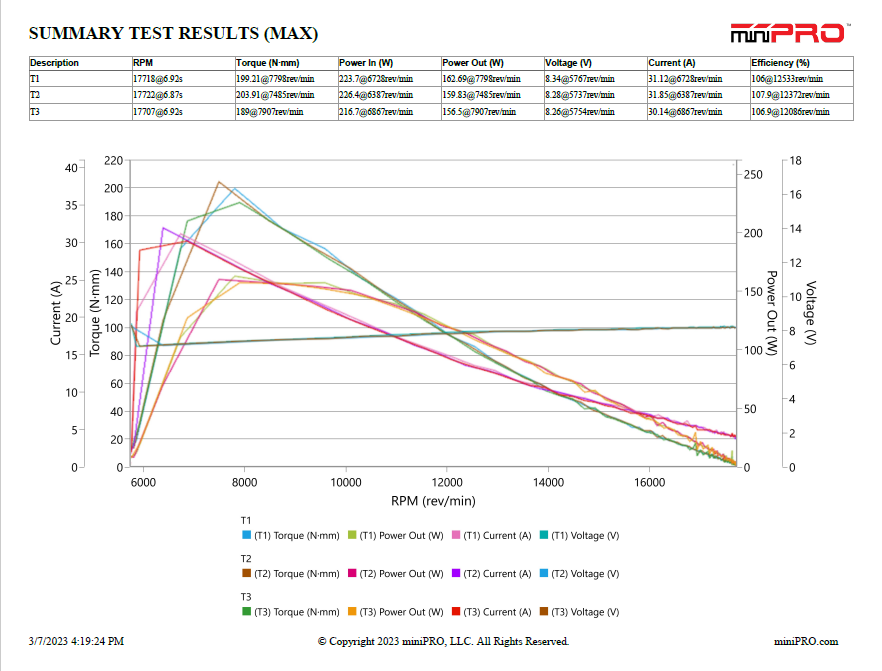
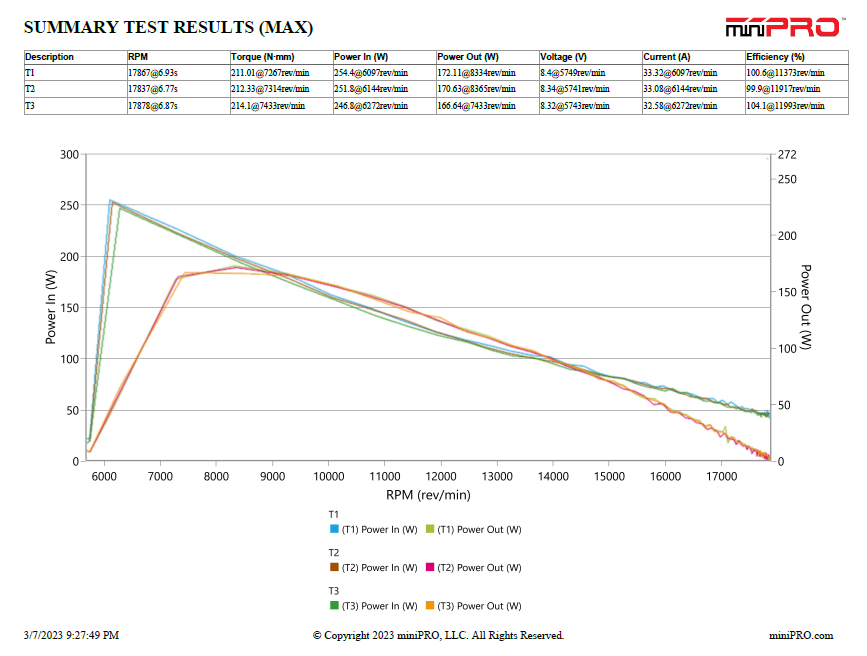
Also another interesting observation I found. Here is an R1 v21-s 21.5, short rotor. These are 2 runs made with different batteries. One battery reads about 6milliohms resistance per cell on my icharger and the other reads 3-4 per cell. Looking at the data you can see that Power in, Power out, and current are all higher with the better battery. The peak power is actually a bigger gap from the batteries than the peak power spread from timing changes. Leading me to believe that the battery might be a bigger factor than the motor. And, this wasn't even one of my good batteries...
03-18-2023, 02:57 PM
#39
Belt tension can be an issue. I tried dynoing some brushed motors that only have bushings. The amount of tension you need on the belt, causes significant side load on the motor shaft and it doesn't spin freely.
Looks like Jose at MiniPro decided to attempt to minimize belt slippage the same way I did. I still think bigger sprockets would be the best way to fix this. On the motor, there's not many teeth engaging the belt.

Looks like Jose at MiniPro decided to attempt to minimize belt slippage the same way I did. I still think bigger sprockets would be the best way to fix this. On the motor, there's not many teeth engaging the belt.
03-20-2023, 10:13 AM
#40
Belt tension can be an issue. I tried dynoing some brushed motors that only have bushings. The amount of tension you need on the belt, causes significant side load on the motor shaft and it doesn't spin freely.
Looks like Jose at MiniPro decided to attempt to minimize belt slippage the same way I did. I still think bigger sprockets would be the best way to fix this. On the motor, there's not many teeth engaging the belt.
Looks like Jose at MiniPro decided to attempt to minimize belt slippage the same way I did. I still think bigger sprockets would be the best way to fix this. On the motor, there's not many teeth engaging the belt.
03-25-2023, 07:35 AM
#41
It's not perfect. 2 problems I have. First the screws on the pivot point tend to come loose over time. Probably should use some loctite. The second issue is the tensioning the belt. What you don't see in the picture is the block of wood I use under the screw. You need quite a bit of movement to get the belt on/off and screwing a really long screw in or out to get the belt off would be slower than using the standard mount. So I just made a block of wood to slide under it. It also doubles as spacer to adjust how far to slide the motor into the mount to perfectly align the pulleys.
If you want the STL, PM me with your email and I'll send it.
If you want the STL, PM me with your email and I'll send it.
04-08-2023, 10:22 PM
#42
i think the v5 team powers motor should be the next one for you stephen.
04-10-2023, 03:11 PM
#44
My Minipro mods are successful. I replaced the 32t pulley on the flywheel with a 48t and replaced the 16t pulley on the motor with a 24t. What an improvement to smoothness. No more belt jumping and that awful noise when it does. I had to get a new belt of 200mm to fit. And I wasn't able to find a 24t pulley with a 1/8" bore size, so I got one with a 5mm bore and sleeved the bore.
It was important to keep the same 2:1 ratio so the measurements would be the same. I've only tested a couple of motors I previously tested with the old setup and I'm getting the same numbers in terms of peak power/torque. I tested a 13.5t and 25.5t motors.
It was important to keep the same 2:1 ratio so the measurements would be the same. I've only tested a couple of motors I previously tested with the old setup and I'm getting the same numbers in terms of peak power/torque. I tested a 13.5t and 25.5t motors.
04-13-2023, 10:27 AM
#45
My Minipro mods are successful. I replaced the 32t pulley on the flywheel with a 48t and replaced the 16t pulley on the motor with a 24t. What an improvement to smoothness. No more belt jumping and that awful noise when it does. I had to get a new belt of 200mm to fit. And I wasn't able to find a 24t pulley with a 1/8" bore size, so I got one with a 5mm bore and sleeved the bore.
It was important to keep the same 2:1 ratio so the measurements would be the same. I've only tested a couple of motors I previously tested with the old setup and I'm getting the same numbers in terms of peak power/torque. I tested a 13.5t and 25.5t motors.
It was important to keep the same 2:1 ratio so the measurements would be the same. I've only tested a couple of motors I previously tested with the old setup and I'm getting the same numbers in terms of peak power/torque. I tested a 13.5t and 25.5t motors.
Also he is about to release a 5v power supply to use with a 1s esc, which is pretty nice. With that addition I wonder if a 3d printed mount to attach directly to the flywheel is an option? Might need one of the lighter flywheels...