


 4Likes
4Likespower versus torque at rpm
 01-06-2019, 04:10 PM
01-06-2019, 04:10 PM
#46
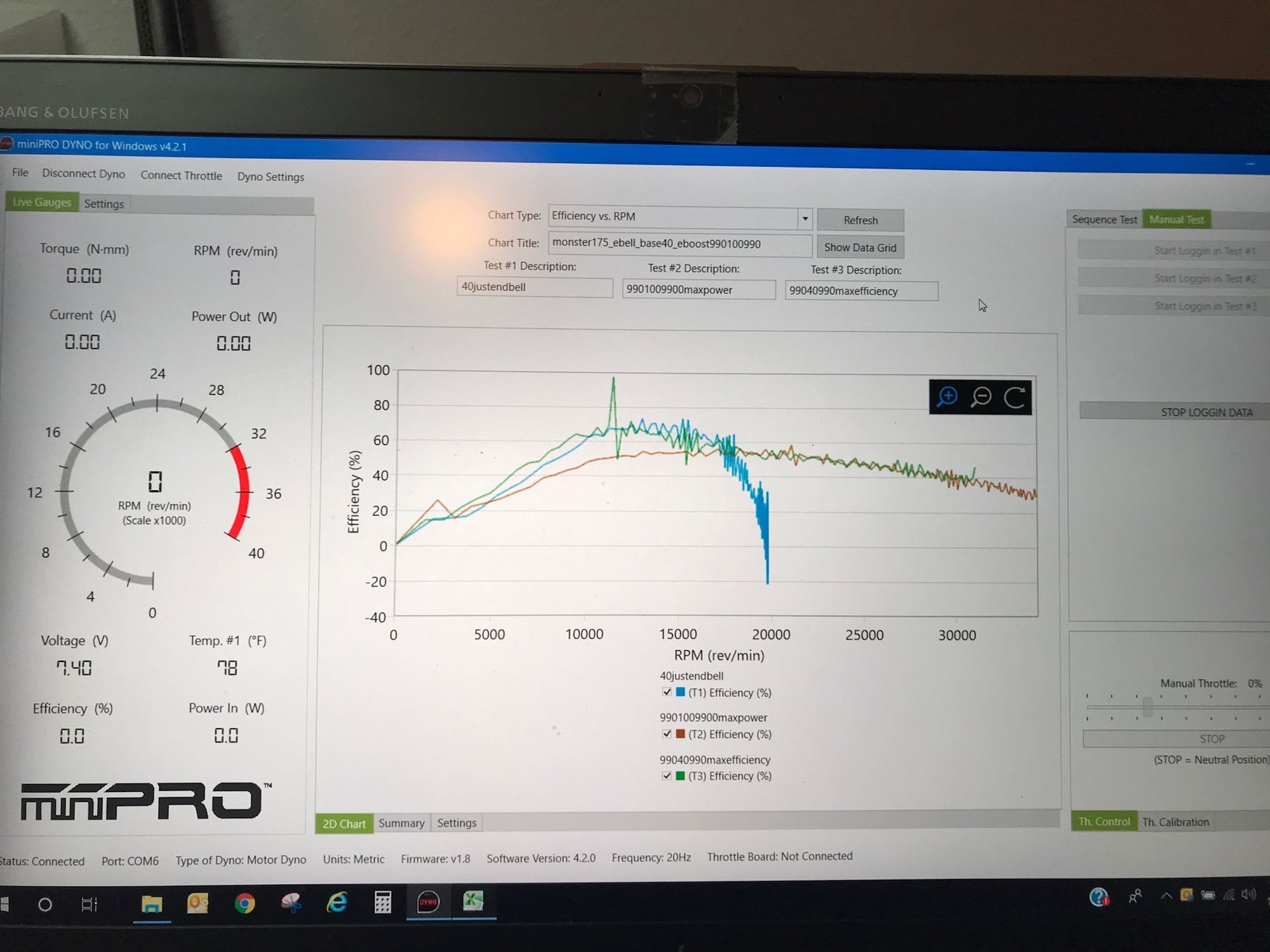
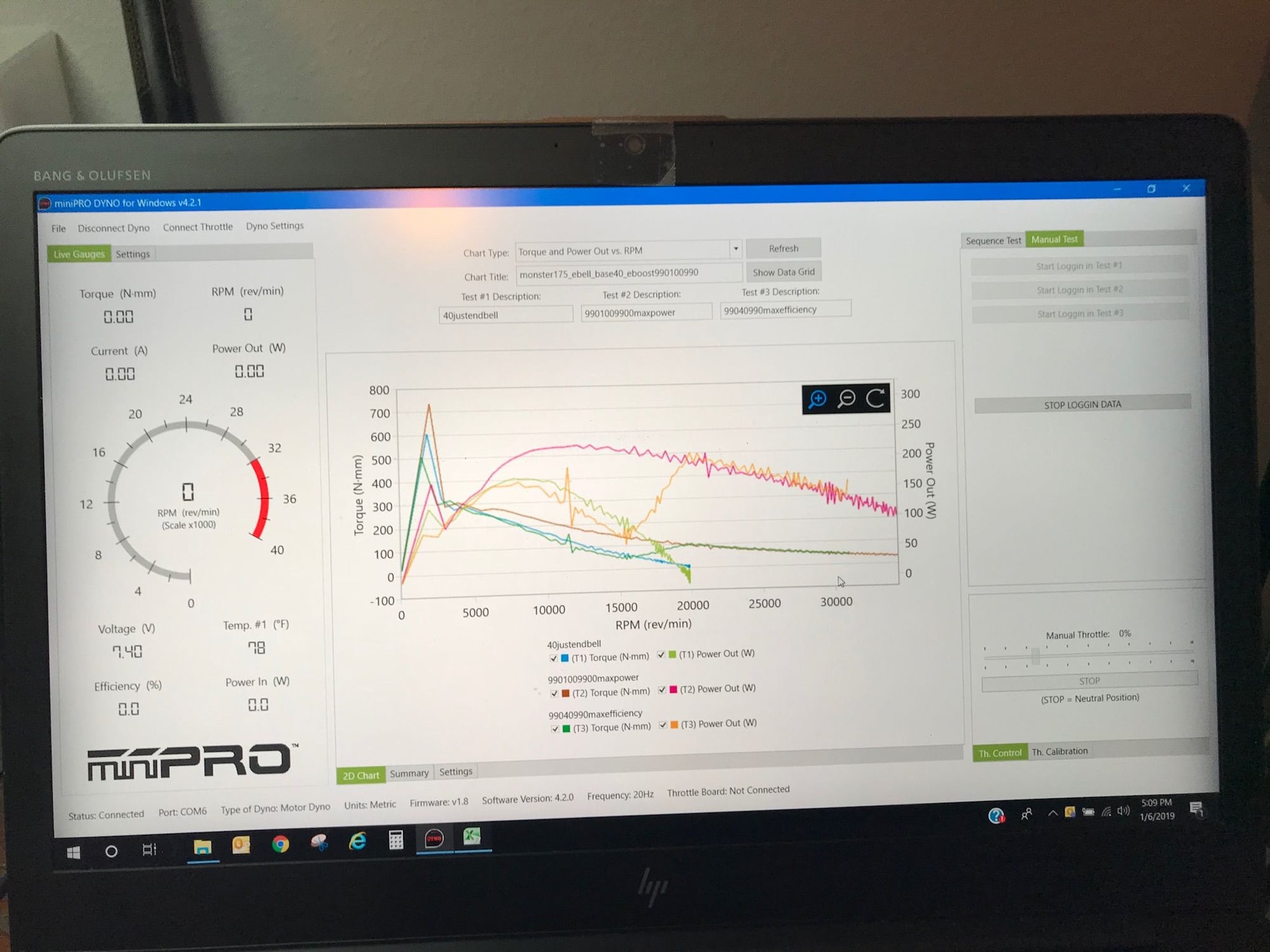
Here is something very interesting. I set the end bell to maximum torque down low and then i use boost from that point on. About half way up efficiency falls on its face so the boost if set to widen that curve. A few guys have talked about blending curves. This is a pretty radical blend.
 01-06-2019, 05:31 PM
01-06-2019, 05:31 PM
#47
I think you will find if you try to make the timing come in after the motor has already got to the peak of the torque curve that your car will feel like it has a two speed transmission on track. You might be able to get it to work better than I could because of how you are able to analyze your data. Even still, on track it will feel like it does something non-linear which might make the car harder to drive. I race off-road, so if something non-linear happens with the throttle it can cause loss of traction or strange jumping characteristics. To get the most linear feeling throttle with timing I looked at my rpm ranges on my telemetry data from a run with a blinky setup that was at the limit. Then I picked my gearing, motor timing and rpm range for my timing. It makes the motor feel like a mod motor, and everything was warm to the touch after a run.
This is one of the downfalls of running on a chassis dyno. You need to analyze the data the car makes on track, and make your adjustments based on how that data changes.
On track you only go from 0 rpms once (or as few times as possible). You are going to have a range of usable rpm based on a gearing choice (which changes any time the layout changes). If timing starts coming in right at the beginning of the rpm range it will arc out very linear power and efficiency numbers. At the top of the rpm range I am running ≈95� of timing.
That is a quote from that 3 part write up on motor/esc timing. If you want the most efficient setup, you need to keep the neutral plane in the right spot through the whole on track rpm range.
This is one of the downfalls of running on a chassis dyno. You need to analyze the data the car makes on track, and make your adjustments based on how that data changes.
On track you only go from 0 rpms once (or as few times as possible). You are going to have a range of usable rpm based on a gearing choice (which changes any time the layout changes). If timing starts coming in right at the beginning of the rpm range it will arc out very linear power and efficiency numbers. At the top of the rpm range I am running ≈95� of timing.
Efficiency and Power
So, ideally, the commutation would be aligned with the neutral plane, right?
You remember the winding time? This is the time it takes for the current to change direction in the coils, and since it takes some time, you can guess that it�s really something progressive: the current fades down to zero, then rises (in the other direction).
This brings the question, which part of this process do you want to align with the neutral plane? When it starts, when the current is zero, or when the coils are re-energized?
The answer is, frustratingly, �it depends�. If it�s done when at zero, it will be most efficient, but if it�s done in the earlier phase of the process, there will be more power output. Isn�t that the same, power and efficiency? Not precisely: being efficient might have a bit less output power, but will consume less supplied power to produce it. For example, the more powerful setting could have 5% more power output, but consume 10% more input power.
In spec racing, you might want to optimise for higher power, while in modified racing, you could have a motor that has plenty of power, but you might want to optimise it for efficiency (improving the runtime, and keeping the motor cooler).
So, ideally, the commutation would be aligned with the neutral plane, right?
You remember the winding time? This is the time it takes for the current to change direction in the coils, and since it takes some time, you can guess that it�s really something progressive: the current fades down to zero, then rises (in the other direction).
This brings the question, which part of this process do you want to align with the neutral plane? When it starts, when the current is zero, or when the coils are re-energized?
The answer is, frustratingly, �it depends�. If it�s done when at zero, it will be most efficient, but if it�s done in the earlier phase of the process, there will be more power output. Isn�t that the same, power and efficiency? Not precisely: being efficient might have a bit less output power, but will consume less supplied power to produce it. For example, the more powerful setting could have 5% more power output, but consume 10% more input power.
In spec racing, you might want to optimise for higher power, while in modified racing, you could have a motor that has plenty of power, but you might want to optimise it for efficiency (improving the runtime, and keeping the motor cooler).
Last edited by waitwhat; 01-06-2019 at 05:41 PM.
01-06-2019, 07:51 PM
#48
I think you will find if you try to make the timing come in after the motor has already got to the peak of the torque curve that your car will feel like it has a two speed transmission on track. You might be able to get it to work better than I could because of how you are able to analyze your data. Even still, on track it will feel like it does something non-linear which might make the car harder to drive. I race off-road, so if something non-linear happens with the throttle it can cause loss of traction or strange jumping characteristics. To get the most linear feeling throttle with timing I looked at my rpm ranges on my telemetry data from a run with a blinky setup that was at the limit. Then I picked my gearing, motor timing and rpm range for my timing. It makes the motor feel like a mod motor, and everything was warm to the touch after a run.
This is one of the downfalls of running on a chassis dyno. You need to analyze the data the car makes on track, and make your adjustments based on how that data changes.
On track you only go from 0 rpms once (or as few times as possible). You are going to have a range of usable rpm based on a gearing choice (which changes any time the layout changes). If timing starts coming in right at the beginning of the rpm range it will arc out very linear power and efficiency numbers. At the top of the rpm range I am running ≈95� of timing.
That is a quote from that 3 part write up on motor/esc timing. If you want the most efficient setup, you need to keep the neutral plane in the right spot through the whole on track rpm range.
This is one of the downfalls of running on a chassis dyno. You need to analyze the data the car makes on track, and make your adjustments based on how that data changes.
On track you only go from 0 rpms once (or as few times as possible). You are going to have a range of usable rpm based on a gearing choice (which changes any time the layout changes). If timing starts coming in right at the beginning of the rpm range it will arc out very linear power and efficiency numbers. At the top of the rpm range I am running ≈95� of timing.
That is a quote from that 3 part write up on motor/esc timing. If you want the most efficient setup, you need to keep the neutral plane in the right spot through the whole on track rpm range.
But I figured out the ratios sanwa is using so i tried to see how low I could get the torque in the curve. its ludicrous. its a massive bump down low. When I bump it that low it carries it through rpms better than it does if I started the bump later. its something to investigate and interesting. with the power opening up (and efficiency following) its really got me thinking that if i can keep that (5k) notch out of the operating range for areas that need smooth acceleration a major gear change might be in order. On the 215 the standard deviation was like 2250 rpm. If the stuff outside of the standard deviation is in non-important parts of the track centering the power on this crazy curve might be ok.
I was showing off a little when I made that efficiency curve. if you look close you can see how tight the intersects are of a massive change in torque.
01-06-2019, 08:08 PM
#49
The neutral plane is difficult. I know where its at and i know how to advance and retard it. This was my original goal was to improve the commutation by adjusting the timing for field distortion. I tried it. It appears the timing settings arent the be all end all in the sanwa esc. I could use timing to adjust for field distortion in some places and not in others. i think sanwa is running some calculation behind the scenes but im not sure yet.
if someone needs a picture of what the wave form looks like at dead center neutral I can take a picture. Maybe i need a dumber esc.
if someone needs a picture of what the wave form looks like at dead center neutral I can take a picture. Maybe i need a dumber esc.
01-07-2019, 12:03 AM
#50
I know the telemetry and integration of the sanwa esc is appealing. I recommend going with a tekin esc if you find yourself in the market for something new. The data logging is integrated into the software and the adjustability let's you do what you want; the team manager is very knowledgeable and is active on this forum (as are the owners).
Have you tried any of these settings on track?
Have you played with gearing in any of these tests? If you gear down some it will let the motor rev through to the timing more quickly.
Have you tried any of these settings on track?
Have you played with gearing in any of these tests? If you gear down some it will let the motor rev through to the timing more quickly.
01-07-2019, 04:23 PM
#51
I know the telemetry and integration of the sanwa esc is appealing. I recommend going with a tekin esc if you find yourself in the market for something new. The data logging is integrated into the software and the adjustability let's you do what you want; the team manager is very knowledgeable and is active on this forum (as are the owners).
Have you tried any of these settings on track?
Have you played with gearing in any of these tests? If you gear down some it will let the motor rev through to the timing more quickly.
Have you tried any of these settings on track?
Have you played with gearing in any of these tests? If you gear down some it will let the motor rev through to the timing more quickly.
I had the original Tekin rs. Its good equipment. The integral telemetry and ability to change all parameters and timing while in motion is hard to beat in the sanwa. I can review logs from the radio while on the track.
I probably would never used half of he settings in the esc if it wasnt for the fact I could change them almost realtime. i didnt think throttle smoothness, abs, punch...would result in much until I realized they were easy to change. Not only did i drop .2-.3 off my lap time the car feels slow but its faster than ever.
01-07-2019, 08:42 PM
#52
No offense to Tekin. I like their equipment. Industries take cues from other industries. Commercial and industrial electronics are under going a transformation. Some RC component MFG will analyze a little of what is going on around them and pick up something original or something similar to tech that other industries have been doing for awhile. if the barrier to entry is relatively low and the potential payoff is high it will come to RC. if its embraced in a way that people vote with their dollars more will come. or a company like a radio mfg that is the center point of these systems will start locking competition out.
Most of the revolution is stemmed in program features, analytics, connectivity, ease of use, speed, power, efficiency, size...each mfg will pick the magic formula that represents their brand and distinguishes them from another brand and people will gravitate towards their preference with their dollars until they want 5 herbs and spices instead of 3. All the while the manufacturers are looking for a magic bullet for a component someone releases a mediocre series of products that are all interconnected in a way that a mfg that only specializes in 1 thing will struggle. Mobile devices will create some stability for awhile but everyone has mobility and a handful of great features including the radio mfgs. what you want is the longest list of real features and benefits.
an integrated system (RX, TX, servo, motor, fan, chassis, support, application) has capabilities that are greater than the sum of the components. its hasnt arrived in RC and its hard to trust something that seems to make a little sense but you havent experienced or seen it for yourself. The benefits piece by piece are slowly build leverage until there are a set of features that you only get by using all brand x. there will still be die hard fans of niche capabilities (im one) but a mfg that delivers a product greater than the conventional sum of the components will make it difficult for these less integrated products to compete. Im primarily a motion control guy so i hope the ESC mfgs become the centerpoint but history shows that the control side of a system steers the market.
it sucks but if the ESC and servo mfgs dont create a demand that the radio mfgs have to follow it will probably mean they are subject to closed architecture systems that the radio guys develop. For awhile the radio guys will let the other MFGs pay licensing fees for a chip or a feature until the radio mfg just barely provides any help to the 3rd parties. obviously this doomsday scenario comes from where your dollars go and how the MFGs use those dollars to leverage the markets. In the end it will benefit the public. Im not convinced that the rc industry is so small and niche that it will never happen. in fact I see signs of the big boys generating leverage now.
Most of the revolution is stemmed in program features, analytics, connectivity, ease of use, speed, power, efficiency, size...each mfg will pick the magic formula that represents their brand and distinguishes them from another brand and people will gravitate towards their preference with their dollars until they want 5 herbs and spices instead of 3. All the while the manufacturers are looking for a magic bullet for a component someone releases a mediocre series of products that are all interconnected in a way that a mfg that only specializes in 1 thing will struggle. Mobile devices will create some stability for awhile but everyone has mobility and a handful of great features including the radio mfgs. what you want is the longest list of real features and benefits.
an integrated system (RX, TX, servo, motor, fan, chassis, support, application) has capabilities that are greater than the sum of the components. its hasnt arrived in RC and its hard to trust something that seems to make a little sense but you havent experienced or seen it for yourself. The benefits piece by piece are slowly build leverage until there are a set of features that you only get by using all brand x. there will still be die hard fans of niche capabilities (im one) but a mfg that delivers a product greater than the conventional sum of the components will make it difficult for these less integrated products to compete. Im primarily a motion control guy so i hope the ESC mfgs become the centerpoint but history shows that the control side of a system steers the market.
it sucks but if the ESC and servo mfgs dont create a demand that the radio mfgs have to follow it will probably mean they are subject to closed architecture systems that the radio guys develop. For awhile the radio guys will let the other MFGs pay licensing fees for a chip or a feature until the radio mfg just barely provides any help to the 3rd parties. obviously this doomsday scenario comes from where your dollars go and how the MFGs use those dollars to leverage the markets. In the end it will benefit the public. Im not convinced that the rc industry is so small and niche that it will never happen. in fact I see signs of the big boys generating leverage now.
01-07-2019, 08:50 PM
#53
Sorry for the rambling but its difficult to predict what will happen in the future. No guarantee history will repeat in RC but look around you and ask yourself if the revolutions you see come from mobile phones or interconnections that you are exposed to through mobile phones. I�d like to see all mfgs rise with the tech but there is a strong possibility that mfgs are caught up in graduated steps and smaller scale predictions about direction. Its not easy keeping up with tech and if you know where to look you can make more informed decisions.
01-08-2019, 08:16 AM
#54
The thing is, in rc racing there are regulations set forth by the governing body. Some rules are put in place as cost control measures. If one company comes out with a system that is integrated, and that system works so much better, it creates a "must run this to win" situation. It would also force other manufacturers to try and do the same thing, thus ballooning the cost of being competitive. This already played out when one esc manufacturer (advanced electronics) had the only esc that could do a timing ramp. The esc was $600 and was a clear on track advantage. Funny thing happened. The first really big race where that esc was used was a week long race. By the time the qualifying started, Tekin had a free software release that did the exact same thing.
Shortly after that it became a two tier system of those who had an esc with timing advance and those who didn't. Other esc's with timing advance started to come out, but the added complexity of the timing adjustments made it even easier to screw up a setting and cause the magic smoke to come out of something. In the end they just said spec classes must run blinky.
The other pitfall if integration is when something fails. If your esc and receiver are one unit and the receiver part fails, you are now out an esc too.
Ultimately, it comes down to the fact that your track let's you run timing in your esc and active data acquisition. Both of these things would be against the rules at ROAR sanctioned events. I feel that it should be allowed to run the next highest wind motor with esc timing in blinky classes as the power levels work out to be close to the same, and you don't have to push the motor so hard like you do in a blinky class.
I think you feel the car is slower because it actually is. This means it is easier for you to make less driving errors, which results in an overall faster lap time for you. Spec racing is about carrying corner speed and slowing down as little as possible for the corners. If you over drive your car, more power will make you go slower, not faster. Put your 17.5 blinky setup back in and I bet you will go just as fast or faster. If so, the change in lap times is likely your improved driving ability.
I also suspect you race somewhere with very few entries in each class. This means there is a very high likelihood that nobody you race with is that close to the physical limit of what a 17.5 tc could actually do. Is there one guy that is a couple laps faster than everyone else? If so, those are the lap times you should be working towards. Have you ever been to a race with 50+ people in one class? There you would find about 5 people who can drive at the limit. In that case, having a car with 2-3% more power only means something if you can get everything out of your car. 95% of 100 is still faster than 85% of 103.
It's great that you get enjoyment out of the development side of the hobby, but for the vast majority of people, that is just not what they enjoy. Our hobby is dying out because it is difficult, and too many people want it to be easy. An integrated system is good for decreasing complexity, but it also becomes a limiting factor. What if someone running the Sanwa esc/receiver wants to run 1/8th scale stuff too? Now because Sanwa doesn't make an 1/8th scale esc they have to buy a normal receiver and esc. What if that new esc has features that the Sanwa combo doesn't. Now that person may be compelled to try a different esc from their integrated combo, which means taking a step backwards in terms of integration.
Shortly after that it became a two tier system of those who had an esc with timing advance and those who didn't. Other esc's with timing advance started to come out, but the added complexity of the timing adjustments made it even easier to screw up a setting and cause the magic smoke to come out of something. In the end they just said spec classes must run blinky.
The other pitfall if integration is when something fails. If your esc and receiver are one unit and the receiver part fails, you are now out an esc too.
Ultimately, it comes down to the fact that your track let's you run timing in your esc and active data acquisition. Both of these things would be against the rules at ROAR sanctioned events. I feel that it should be allowed to run the next highest wind motor with esc timing in blinky classes as the power levels work out to be close to the same, and you don't have to push the motor so hard like you do in a blinky class.
I think you feel the car is slower because it actually is. This means it is easier for you to make less driving errors, which results in an overall faster lap time for you. Spec racing is about carrying corner speed and slowing down as little as possible for the corners. If you over drive your car, more power will make you go slower, not faster. Put your 17.5 blinky setup back in and I bet you will go just as fast or faster. If so, the change in lap times is likely your improved driving ability.
I also suspect you race somewhere with very few entries in each class. This means there is a very high likelihood that nobody you race with is that close to the physical limit of what a 17.5 tc could actually do. Is there one guy that is a couple laps faster than everyone else? If so, those are the lap times you should be working towards. Have you ever been to a race with 50+ people in one class? There you would find about 5 people who can drive at the limit. In that case, having a car with 2-3% more power only means something if you can get everything out of your car. 95% of 100 is still faster than 85% of 103.
It's great that you get enjoyment out of the development side of the hobby, but for the vast majority of people, that is just not what they enjoy. Our hobby is dying out because it is difficult, and too many people want it to be easy. An integrated system is good for decreasing complexity, but it also becomes a limiting factor. What if someone running the Sanwa esc/receiver wants to run 1/8th scale stuff too? Now because Sanwa doesn't make an 1/8th scale esc they have to buy a normal receiver and esc. What if that new esc has features that the Sanwa combo doesn't. Now that person may be compelled to try a different esc from their integrated combo, which means taking a step backwards in terms of integration.
01-08-2019, 08:51 PM
#55
The thing is, in rc racing there are regulations set forth by the governing body. Some rules are put in place as cost control measures. If one company comes out with a system that is integrated, and that system works so much better, it creates a "must run this to win" situation. It would also force other manufacturers to try and do the same thing, thus ballooning the cost of being competitive. This already played out when one esc manufacturer (advanced electronics) had the only esc that could do a timing ramp. The esc was $600 and was a clear on track advantage. Funny thing happened. The first really big race where that esc was used was a week long race. By the time the qualifying started, Tekin had a free software release that did the exact same thing.
Shortly after that it became a two tier system of those who had an esc with timing advance and those who didn't. Other esc's with timing advance started to come out, but the added complexity of the timing adjustments made it even easier to screw up a setting and cause the magic smoke to come out of something. In the end they just said spec classes must run blinky.
The other pitfall if integration is when something fails. If your esc and receiver are one unit and the receiver part fails, you are now out an esc too.
Ultimately, it comes down to the fact that your track let's you run timing in your esc and active data acquisition. Both of these things would be against the rules at ROAR sanctioned events. I feel that it should be allowed to run the next highest wind motor with esc timing in blinky classes as the power levels work out to be close to the same, and you don't have to push the motor so hard like you do in a blinky class.
I think you feel the car is slower because it actually is. This means it is easier for you to make less driving errors, which results in an overall faster lap time for you. Spec racing is about carrying corner speed and slowing down as little as possible for the corners. If you over drive your car, more power will make you go slower, not faster. Put your 17.5 blinky setup back in and I bet you will go just as fast or faster. If so, the change in lap times is likely your improved driving ability.
I also suspect you race somewhere with very few entries in each class. This means there is a very high likelihood that nobody you race with is that close to the physical limit of what a 17.5 tc could actually do. Is there one guy that is a couple laps faster than everyone else? If so, those are the lap times you should be working towards. Have you ever been to a race with 50+ people in one class? There you would find about 5 people who can drive at the limit. In that case, having a car with 2-3% more power only means something if you can get everything out of your car. 95% of 100 is still faster than 85% of 103.
It's great that you get enjoyment out of the development side of the hobby, but for the vast majority of people, that is just not what they enjoy. Our hobby is dying out because it is difficult, and too many people want it to be easy. An integrated system is good for decreasing complexity, but it also becomes a limiting factor. What if someone running the Sanwa esc/receiver wants to run 1/8th scale stuff too? Now because Sanwa doesn't make an 1/8th scale esc they have to buy a normal receiver and esc. What if that new esc has features that the Sanwa combo doesn't. Now that person may be compelled to try a different esc from their integrated combo, which means taking a step backwards in terms of integration.
Shortly after that it became a two tier system of those who had an esc with timing advance and those who didn't. Other esc's with timing advance started to come out, but the added complexity of the timing adjustments made it even easier to screw up a setting and cause the magic smoke to come out of something. In the end they just said spec classes must run blinky.
The other pitfall if integration is when something fails. If your esc and receiver are one unit and the receiver part fails, you are now out an esc too.
Ultimately, it comes down to the fact that your track let's you run timing in your esc and active data acquisition. Both of these things would be against the rules at ROAR sanctioned events. I feel that it should be allowed to run the next highest wind motor with esc timing in blinky classes as the power levels work out to be close to the same, and you don't have to push the motor so hard like you do in a blinky class.
I think you feel the car is slower because it actually is. This means it is easier for you to make less driving errors, which results in an overall faster lap time for you. Spec racing is about carrying corner speed and slowing down as little as possible for the corners. If you over drive your car, more power will make you go slower, not faster. Put your 17.5 blinky setup back in and I bet you will go just as fast or faster. If so, the change in lap times is likely your improved driving ability.
I also suspect you race somewhere with very few entries in each class. This means there is a very high likelihood that nobody you race with is that close to the physical limit of what a 17.5 tc could actually do. Is there one guy that is a couple laps faster than everyone else? If so, those are the lap times you should be working towards. Have you ever been to a race with 50+ people in one class? There you would find about 5 people who can drive at the limit. In that case, having a car with 2-3% more power only means something if you can get everything out of your car. 95% of 100 is still faster than 85% of 103.
It's great that you get enjoyment out of the development side of the hobby, but for the vast majority of people, that is just not what they enjoy. Our hobby is dying out because it is difficult, and too many people want it to be easy. An integrated system is good for decreasing complexity, but it also becomes a limiting factor. What if someone running the Sanwa esc/receiver wants to run 1/8th scale stuff too? Now because Sanwa doesn't make an 1/8th scale esc they have to buy a normal receiver and esc. What if that new esc has features that the Sanwa combo doesn't. Now that person may be compelled to try a different esc from their integrated combo, which means taking a step backwards in terms of integration.
I appreciate you sir. Very good information. The integrated system has whole host of benefits and drawbacks. The best integrated systems come after the initial battle. If sanctioning bodies are selective in the limits the impose...realistic improvements will happen. The boutiques that know one part of the system extremely well release much better products after the initial onslaught of mildly exciting integrated systems. There are business casualties before the stability though.
we get 5 or 10 guys per class if we are lucky. I have to run Blinky too. The point in the dynamic boost is to develop the math for the thermals and it also generates a profile to pick a Blinky timing value that both I and the car are comfortable with. The 21.5 dynamic or 17.5 Blinky fits with my car/track and current capability. I agree with you on the motor comparison. My 21.5 running dynamic is fast and comfortable with fixed timing 17.5s but a bunch of people running around trying to understand dynamic timing probably wont take. However i could program a routine that would teach the esc everything it needs to know to setup aggressive or conservative parameters automatically after a couple laps but its not really necessary. im at my limit with a 17.5 Blinky or 21.5 dynamic. They feel really similar. The 21.5 is just a little less responsive so it forces me to use allot more electronic features.
i ran laps with the dynamic 17.5 very close (not better) to the dynamic 21.5 but it was allot more work and thought (today). If you look at the 17.5 curve it has some minor artifacts but massive power difference. The efficiency curve had a huge self induced artifact that we suspected may unsettle thing it was minor. I�ll force myself to drive the power curve for practice because i have no choice but to be completely focused and it will improve my skills and setup. But the efficiency curve was allot easier to drive. Its still a handful compared to a 17.5 Blinky. In either case i couldnt predict corrections because it all happened way to fast if i drifted a hair out of my groove. These are the same observations i made when i first started and then they faded away. Im hoping i can rinse and repeat.
there are a couple guys that are 1 or 2 seconds a lap faster than everyone and they drive completely different than me or anyone else. I drive a smooth balanced car. One of these guys is on and off throttle like a computer. The front of the car completely understeers on the brakes and then Wildly oversteers on throttle. He steers digitally always neutral or at the extreme. It seems like all of his steering comes from his throttle.
i have fun with the mortals in Blinky and but make no mistake. im focused on learning to beat the immortal. im taking the driving skills and setup path while investigating some things that are simple for me.
I didnt change the FDR on my first Frey into 17.5 dynamic land today. In Blinky that means I can run 40 laps as hard as i can at 70c on the motor. I triggered dynamic which took allot more concentration to get similar laps but the motor came off at 40c. It had too much torque and too much top end. If i didnt view it as a challenge it would be easy to say it was too much motor. i had to set my punch to 10% of what i normally use or it would loop. I�ll check the diff and balance. It will force me Practice and tweak better and my hopes are the 2 efforts will converge at some point. 21.5 Blinky gets boring but forces me to refine my lines. maybe 17.5 Blinky will get boring. At one point 21.5 Blinky was allot of work.
dynamic timing is like racing a class higher and pushes my comfort. I dont hit things anymore. Im cheap and that is why buying an expensive car forced me to drive reasonably. I know how unreasonable that might sound but a little self coercion never hurt anyone. Everyone talks of the delicate awesomatix. i never broke a single part.
Last edited by Bry195; 01-08-2019 at 09:02 PM.
01-16-2019, 08:56 PM
#56
i previously calculated the torque and rpm I needed to stay under the max temp I use for the motor. 72c was the specific number everything stabilized at on track in practice laps. I had a 25 lap race this weekend (5minutes) and hit the hard limit for temp on the 2nd to last lap and lost 3rd place. I guess practice is different than a race. The 17.5 came off at 43c but i had worked the the motor to be controllable because letting it do what it does was too much for me and I placed well so more practice is the focus.
the 21.5 is pushed about as hard as a 200 watt motor can be pushed and if i push it less its boring. The simple answer is change the fdr or back off the timing or...this is a very tight track so heat is coming from the accelerations and the setup will be happier with it being more efficient during acceleration so i moved the centerpoint of the efficiency curve rather than torque curve over the average acceleration rpm. It doesnt start from zero so ...
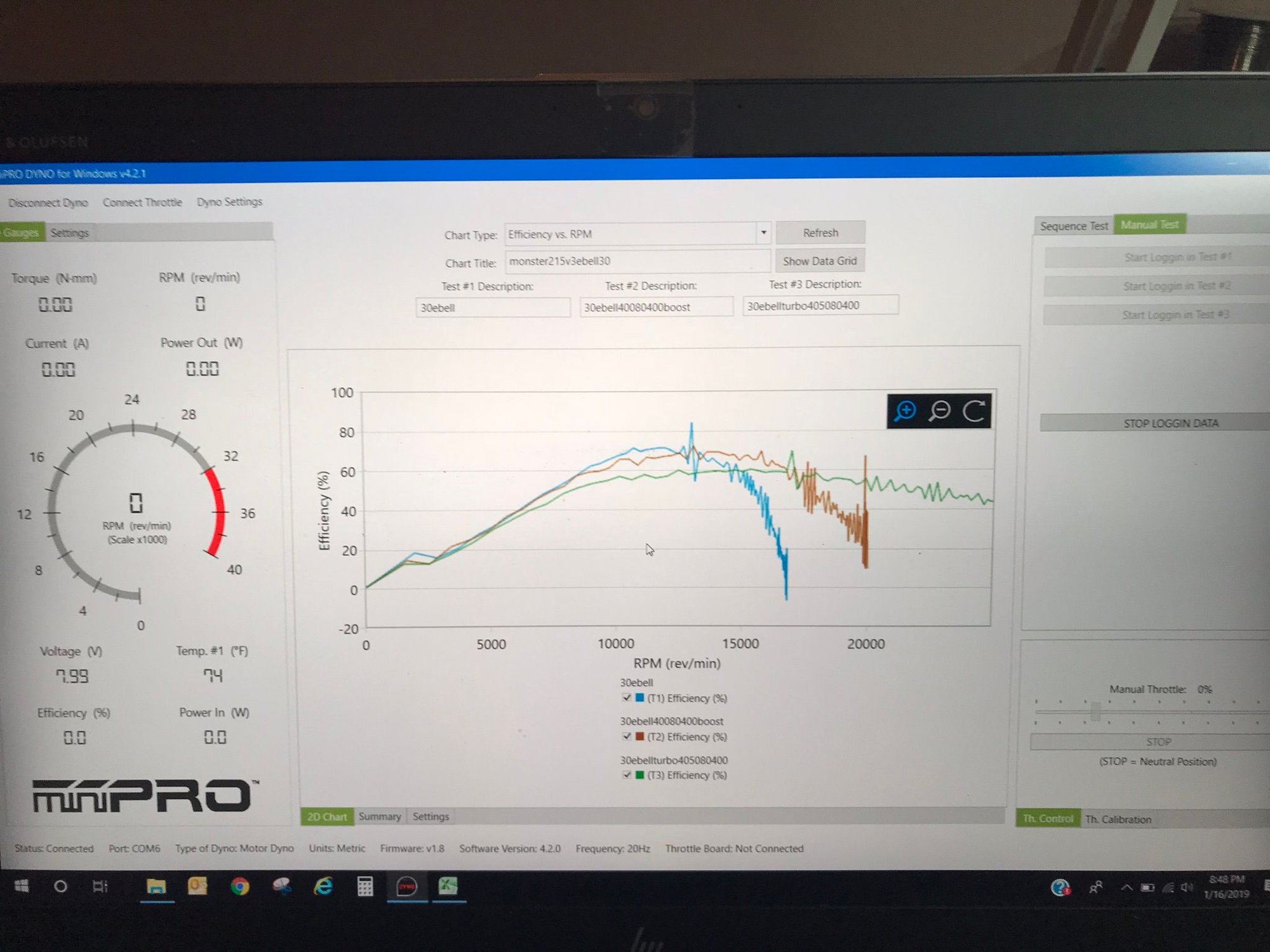
i probably should have stayed true to that concept but i couldnt help myself and added something on top. i moved the centerpoint of the efficiciency curve by setting the end bell to 30 degrees instead of 40 or 50. This took the motor to 70% efficient through those rpms and the rise in torque actually gets me more acceleration torque. As predicted efficiency nose dives right after peak and I need 3500 rpms more at something equal to or better than the 60% I had. i triggered boost at the falling slope and it extended the curve out the way I wanted and should keep the motor temp cooler. It barely got warm on the dyno which is a significant improvement. i have almost equal torque/rpms and 10-15 percent more efficiency. So then i wanted to give myself the opportunity to screw it all up and added turbo. The idea is that I will stay out of full throttle at max rpm. The following dyno log is all 3 conditions. Straight end bell..boost to about 50 and then turbo.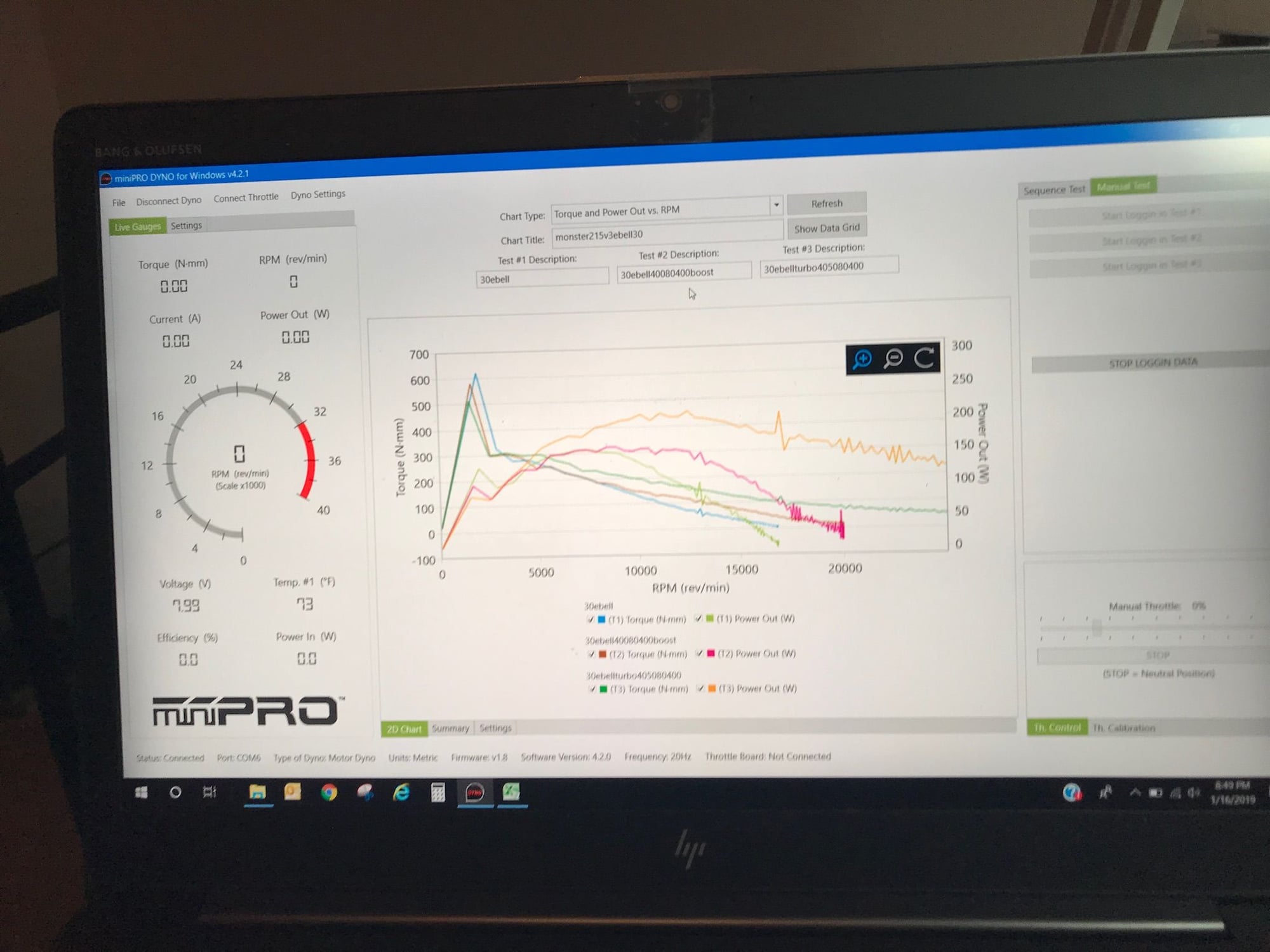
the 21.5 is pushed about as hard as a 200 watt motor can be pushed and if i push it less its boring. The simple answer is change the fdr or back off the timing or...this is a very tight track so heat is coming from the accelerations and the setup will be happier with it being more efficient during acceleration so i moved the centerpoint of the efficiency curve rather than torque curve over the average acceleration rpm. It doesnt start from zero so ...
i probably should have stayed true to that concept but i couldnt help myself and added something on top. i moved the centerpoint of the efficiciency curve by setting the end bell to 30 degrees instead of 40 or 50. This took the motor to 70% efficient through those rpms and the rise in torque actually gets me more acceleration torque. As predicted efficiency nose dives right after peak and I need 3500 rpms more at something equal to or better than the 60% I had. i triggered boost at the falling slope and it extended the curve out the way I wanted and should keep the motor temp cooler. It barely got warm on the dyno which is a significant improvement. i have almost equal torque/rpms and 10-15 percent more efficiency. So then i wanted to give myself the opportunity to screw it all up and added turbo. The idea is that I will stay out of full throttle at max rpm. The following dyno log is all 3 conditions. Straight end bell..boost to about 50 and then turbo.
01-16-2019, 08:59 PM
#57
By the way i think i can use the telemetry to automate the process of negating turbo until 17k rpm so im not pumping heat out when i should just use the boost timing. Staging the timing is pretty easy and works well. If I stay off the throttle end stop until im in the straights the efficiency should stay high and the boost curve will keep the motor slightly warm. If i exceed 73c i just dial the turbo back a hair. I only exceed 17k a once per lap and accelerations land at about 11k.
01-16-2019, 11:05 PM
#58
If you take your at the limit 21.5 blinky gearing and timing and lower each by 10-15%, and put a bunch of dynamic timing (55�) over a large rpm range 2k-18k your 21.5 will run like a 17.5 blinky setup that is at the limit, but it will run cool. Additionally, the bottom end will be more manageable because basically it will be a blinky 21.5 setup until the timing ramp adds more timing than what the endbell can go to. This makes the car very easy to drive because it gives you the best of both worlds. If you pull full trigger hold on, because that motor will spool up really hard when you grab a big hand full.
The neutral plane is the key. If you can get your curves to match what the neutral plane does your motor will make very little heat (barely warm to the touch about 40�C) and a lot of power. I think you need to import your data into something that can do analysis with 3D graphs. Should be way easier to see that everything follows the neutral plane with a paraboloid representing the neutral plane on your graph.
The neutral plane is the key. If you can get your curves to match what the neutral plane does your motor will make very little heat (barely warm to the touch about 40�C) and a lot of power. I think you need to import your data into something that can do analysis with 3D graphs. Should be way easier to see that everything follows the neutral plane with a paraboloid representing the neutral plane on your graph.
01-17-2019, 07:18 AM
#59
If you take your at the limit 21.5 blinky gearing and timing and lower each by 10-15%, and put a bunch of dynamic timing (55�) over a large rpm range 2k-18k your 21.5 will run like a 17.5 blinky setup that is at the limit, but it will run cool. Additionally, the bottom end will be more manageable because basically it will be a blinky 21.5 setup until the timing ramp adds more timing than what the endbell can go to. This makes the car very easy to drive because it gives you the best of both worlds. If you pull full trigger hold on, because that motor will spool up really hard when you grab a big hand full.
The neutral plane is the key. If you can get your curves to match what the neutral plane does your motor will make very little heat (barely warm to the touch about 40�C) and a lot of power. I think you need to import your data into something that can do analysis with 3D graphs. Should be way easier to see that everything follows the neutral plane with a paraboloid representing the neutral plane on your graph.
The neutral plane is the key. If you can get your curves to match what the neutral plane does your motor will make very little heat (barely warm to the touch about 40�C) and a lot of power. I think you need to import your data into something that can do analysis with 3D graphs. Should be way easier to see that everything follows the neutral plane with a paraboloid representing the neutral plane on your graph.
i wanted people to catch a few things and talk about them but it�s hidden in the details so I will just identify them.
if you take your timing from 30 to 40 to 50 you are effectively increasing your kv. You are moving the power to the right which increases your rpm. You lose acceleration torque or efficiency at the low rpm to extend your max rpm. This is a good idea if you are stuffing in the straights. Bad idea if you are losing car lengths in acceleration parts of the track.
i think you can apply this to your sky rc analyzer. If your timing tests are at 10k and torque and current are assumed equal you can move the meat of the curve by moving the current above or below the test rpm to align the curve to what you are missing on the track.
in other words there is a kv and current curve for each 0-max rpm run at a given end bell value. If you know your max rpm for a track should be 16k and your average rpm is 11k use the gearing and timing to get the rpm aligned and torque will be as good as it gets without taking away your low rpm acceleration.

