


 157Likes
157LikesRCHourglass DIY Lap Timing (AKA Cano revised)
 02-12-2019, 06:28 AM
02-12-2019, 06:28 AM
#376
The jumpers are used to tune the circuit to the loop wire length. From Howard Cano specs:
9'x1' to 12'x1' : No jumpers on loop amplifier.
6'x1' to 8'x1' : Use jumper at J3 on loop amplifier.
3'x1' to 4'x1' : Use jumper at J5 on loop amplifier.
I use no jumper, and avoided J4 components R12 and C6.
9'x1' to 12'x1' : No jumpers on loop amplifier.
6'x1' to 8'x1' : Use jumper at J3 on loop amplifier.
3'x1' to 4'x1' : Use jumper at J5 on loop amplifier.
I use no jumper, and avoided J4 components R12 and C6.
 02-12-2019, 01:20 PM
02-12-2019, 01:20 PM
#377
The jumpers are used to tune the circuit to the loop wire length. From Howard Cano specs:
9'x1' to 12'x1' : No jumpers on loop amplifier.
6'x1' to 8'x1' : Use jumper at J3 on loop amplifier.
3'x1' to 4'x1' : Use jumper at J5 on loop amplifier.
I use no jumper, and avoided J4 components R12 and C6.
9'x1' to 12'x1' : No jumpers on loop amplifier.
6'x1' to 8'x1' : Use jumper at J3 on loop amplifier.
3'x1' to 4'x1' : Use jumper at J5 on loop amplifier.
I use no jumper, and avoided J4 components R12 and C6.
02-13-2019, 12:48 AM
#378
It's the size (in foot) of the area of the detection loop. For example I use 9'x1' loop (about 2,7m x 30 cm). That means you need around 6 meter of cable.
02-13-2019, 02:28 AM
#379
02-19-2019, 08:05 AM
#380
Tech Rookie
Hi,
I recently started my old timing project with Tag RF (2.4GHz)
and with my surprise that someone has resumed and improved the cano decorder.
I wanted to ask a question: instead of using the devkit cypress, is it possible to implement RX on an arduino two?
I ask this because I have done almost everything, but it would fail yet to implement the reception on arduino instead of on devkit ..
Let me explain better: I have connected an arduino DUE on one side to an RF receiver, in order to decode the TAGs that passed on the loop and on the other side an orangePI, connected by USB, that decoded the transmission of the tag and re-transmitted me on WIFI or ethernet in MyLaps-compatible coding, for compatibility with the software we use on the track (Rctiming). So in my opinion it will be enough to remove the receiver and mount only the amplifier and the decoder. If this is correct, could the sources be obtained?
******
For a user who asked that toroid use to replicate the Mylaps loop: I used the toroid FT-114-43 by wrapping 25 turns for the loop side and 10 for the decoder side.
I have one question, but when you mention the decoder reading the RC4 tags, do you mean both hibrid and pure?
Thanks
I recently started my old timing project with Tag RF (2.4GHz)
and with my surprise that someone has resumed and improved the cano decorder.
I wanted to ask a question: instead of using the devkit cypress, is it possible to implement RX on an arduino two?
I ask this because I have done almost everything, but it would fail yet to implement the reception on arduino instead of on devkit ..
Let me explain better: I have connected an arduino DUE on one side to an RF receiver, in order to decode the TAGs that passed on the loop and on the other side an orangePI, connected by USB, that decoded the transmission of the tag and re-transmitted me on WIFI or ethernet in MyLaps-compatible coding, for compatibility with the software we use on the track (Rctiming). So in my opinion it will be enough to remove the receiver and mount only the amplifier and the decoder. If this is correct, could the sources be obtained?
******
For a user who asked that toroid use to replicate the Mylaps loop: I used the toroid FT-114-43 by wrapping 25 turns for the loop side and 10 for the decoder side.
I have one question, but when you mention the decoder reading the RC4 tags, do you mean both hibrid and pure?
Thanks
02-20-2019, 06:51 AM
#381
Hi, the transponder capture from RF signal is done in hardware. Original Cano decoder uses logic gates, RCHourglass uses configurable FPGA-like hardware designed in verilog inside the PSOC. There's no way this part can be translated in 'software code' that can run in antoher platform. I'm afraid timing contraints are too much tight to be done software only (but I might be wrong...). RCHourglass decoder can be used with a hardware serial port beside the USB CDC serial port. This is exactly intended to connect with another micro/RPi etc. You can then choose to use one of the 'high level' protocols (AmbRC/Cano etc) and get only the TX passage number and timestamp. Our you can activate 'Monitor mode' to read every RF packet received if you want to do more processing.
RC4 pure and hybrid are read. RC pure require to 'learn' the transponder, the decoder can keep memory for 40 transponders. Some users have reported low read success with hybrids, but I don't have full time access to a hybrid to do deeper tests. Learning the hybrids should increase detection sensitivity. Still investigating this issue...
RC4 pure and hybrid are read. RC pure require to 'learn' the transponder, the decoder can keep memory for 40 transponders. Some users have reported low read success with hybrids, but I don't have full time access to a hybrid to do deeper tests. Learning the hybrids should increase detection sensitivity. Still investigating this issue...
02-21-2019, 08:18 AM
#382
Tech Rookie
Ok, for the moment i prefer to use devkit instead of arduino; if you will publish the sources I will see what I can do ... as soon as I get the devkit I will modify the part that runs on orangePI to receive your encoding.
thanks
thanks
03-13-2019, 07:06 AM
#383
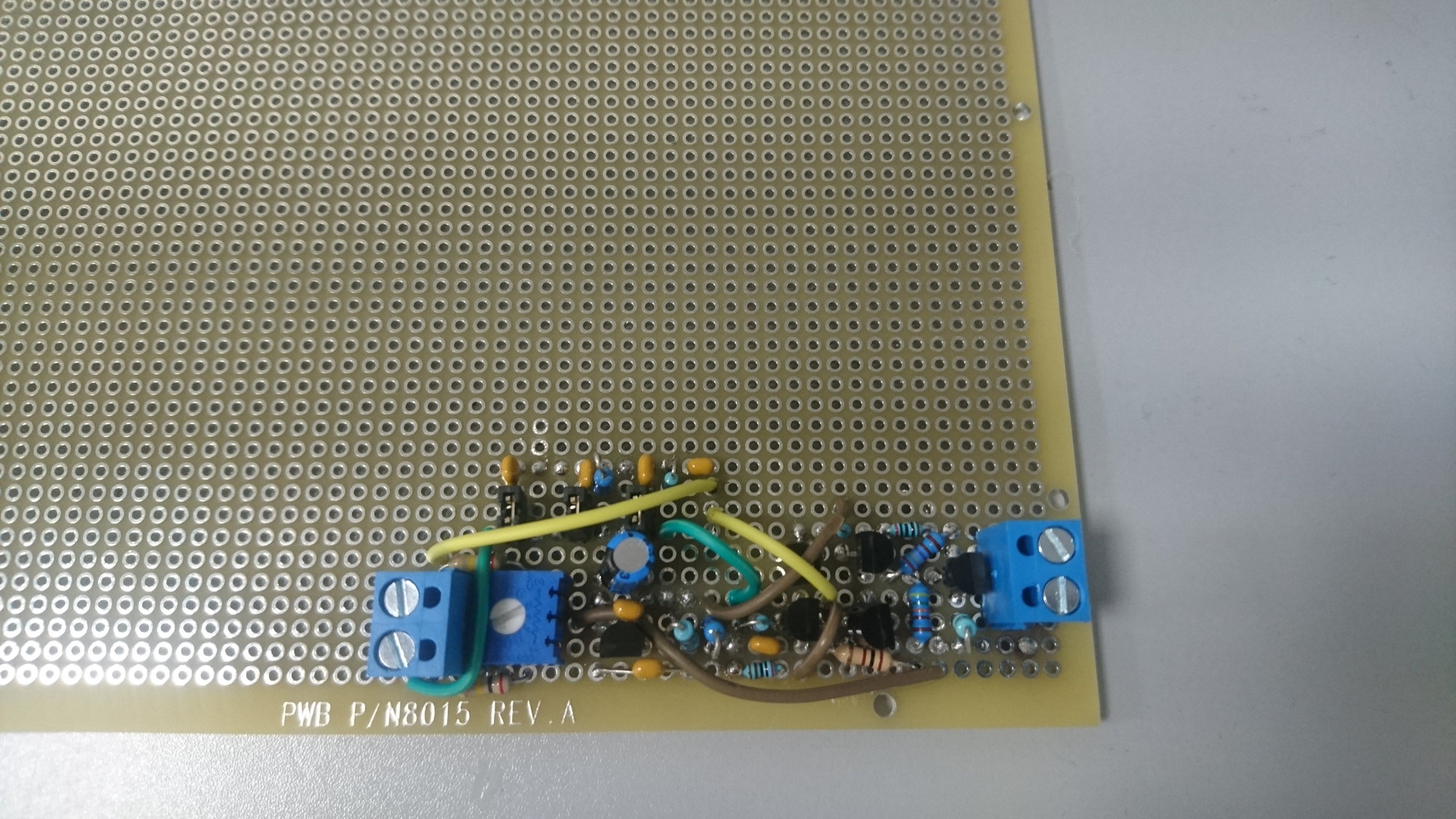
Loop amp ready for the testing. Hope everything is ok.
03-13-2019, 09:35 AM
#384
03-14-2019, 05:01 AM
#385
Tech Rookie
Well, I have been following this thread for some time and I have already decided to manufacture the RChourglass. At the moment my main question is whether the donation has to be made to a specific children's association or can be made to a local association that helps children. Thank you very much for your effort and time invested in this project.
03-14-2019, 05:21 AM
#386
Thank you and let us know about your build.
Marco
Last edited by mv4wd; 03-14-2019 at 05:21 AM. Reason: syntax
04-04-2019, 03:50 PM
#387
Firmware 0.6 available. Serial port emulation mode is not correct. This is useful for people using the decoder with othermicrocontrollers and not through USB
04-05-2019, 02:16 PM
#388
04-19-2019, 10:47 AM
#389
Tech Rookie
Good Morning. I have made the decoder according to their instructions and everything works perfectly the blue led of the PSOC turns on when I pass the transponder over the loop cable, the program counts turns "Everlaps" detects me the passage through the loop but does not start the race it puts me "waiting for the decoder", and the program "ZRound" does not detect the decoder, I have to continue making tests to configure the COM port from 1 to 4 according to what you explain. At the moment I will try it on the track when it solves the communication problems with the lap counting programs. Thanks Marco
04-19-2019, 11:35 AM
#390
Tech Initiate
Everlaps didn't work at least with firmware version 0.5 I didn't tried 0.6 version yet. Marco did some tweaks to serial decoding, maybe it will fix this issue. Zround works great with Cano mode and with AMB mode. Try to config modes with RCHourglassManager.exe or via telnet. It's everything on documentation.