


TC6 4WS
 02-15-2013, 02:37 AM
02-15-2013, 02:37 AM
#1

Since I am one of the guys whose head is always busy thinking about how I can make my Touring Car better (or worse  ), I want to share my 4WS-Project with you.
), I want to share my 4WS-Project with you.
In the TC6 Thread I already posted some pictures, but since the car performs well and gives a very good feedback on every setupchange I think it deserves its own thread in which I will show the development and "career" of the car and its parts and in which we could discuss, create new ideas or you guys can show off your creations.
), I want to share my 4WS-Project with you.In the TC6 Thread I already posted some pictures, but since the car performs well and gives a very good feedback on every setupchange I think it deserves its own thread in which I will show the development and "career" of the car and its parts and in which we could discuss, create new ideas or you guys can show off your creations.
 02-15-2013, 02:59 AM
02-15-2013, 02:59 AM
#2
Tech Regular
You should repost some of the pictures and the four wheel steering video link on here as well - a really interesting and well made project.
02-15-2013, 03:43 AM
#3
The idea for a conversation came in the third or fourth race of the LRP-HPI-Challenge (Indoor season) in which I am participating. The last races ended very good for me with being on the podium several times in the 17.5t-class. Then a race with a highgrip carpet came. No matter what I did, I just wasn't able to cure the understeer my TC6.1 WC had. It was frustrating! The win in the D-Final was not helping as I got a cup for it which will remind me forever...
I start thinking about how I could prevent myself from these experiences. I couldn't find the right car balance, I needed more steering, but on the quest for it you will often end up with oversteering (a sliding rear in the worst case) and/or a braking effect through too much wheel angle. My thought then was: If these are the problems then will a four wheel steering be able to cure these?
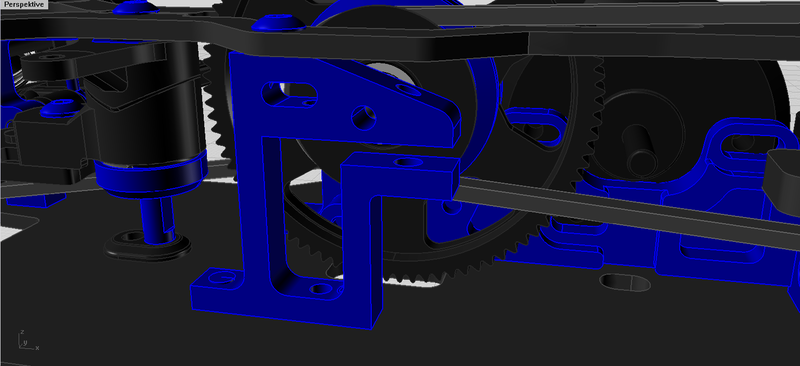
Since I put a TC6 into CAD two years ago it was easy to play around with the solids and check if my idea could work, or what needs to be changed on the existing car to make it work. This were the first results:


In addition to the four wheel steering the car includes two other ideas:
1. the use of Shorty LiPos
and
2. a special LiPo brace which should allow a unhindered chassisflex while holding the battery.
Conversations are expensive. I tried to reduce the costs by needing only a few prototype parts. I was proud when my first design needed only six special parts. I took the motormount and the spurgearbulkheads and placed them 12mm forward to make space for the rear steering rack. Together with the new wholes for the LiPo brace (I called it LiPo flex base) a new topdeck was needed; two new belts for the changed distance from belt pulley to the differentials also; and finally a 120mm long turnbuckle to connect the servo with the front steering arm after I put it behind the shorty LiPo. A double sided servoarm had also to be found

Thats it with the "special" parts. Of course in comparison to a normal TC another pair of front suspension parts are also needed. But since I have so much spares I could save money.
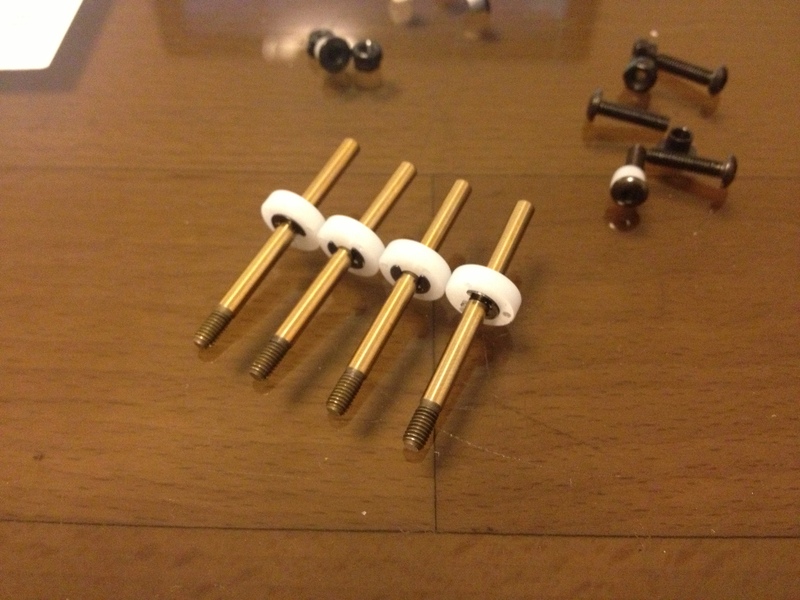
The next step then was to contact my miller to check my parts geometry and order some cfk. The steering turnbuckle and the doublesided servoarm came from HongKong and took some weeks. The cfk was ordered in a german shop like the belts and came with the milled prototype parts very fast to my home:

Like always I couldn't resist and assembled everything:

I couldn't wait for the small parts arriving from HongKong and annoyed a friend to bring a doublesided servoarm from a Sav�x servo (I threw my away just some weeks before ). So I could prepare the car for its maiden drive:
). So I could prepare the car for its maiden drive:




I chose the indoor carpet track of G�nzburg for the first outing. The car was equipped with a 10.5t which is too much power for a protoype on its first meters. Whatever I was too lazy to change the motor and began.
The steering setup was completly wrong. The rear had more steering geometry than the front and it looked strange. After getting used to the new behaviour the car was everything else but not slow! It loved switchbacks. Direction changes happened incredibly fast. In fast corners I had an understeer. This is something I think can be solved with a setup tweak. For the first day I just wanted to concentrate on the steering. For the second run I reduced the rear steering angle to have always the same angles front and rear. The understeer stayed, but steering a little earlier reduced it.
Driving a car with four wheel steering is another world. Interestingly I had to steer earlier than with my TC6.1. Driving it after the 4WS it seemed to steer much stronger and angular. The 4WS race line is just a perfect smooth curve (like ice skating). What seems to be a fight between front and rear axle when driving my TC6.1 on the edge is much more relaxed, swinging, just without overstressing the tires. I could go the same speed as my LRP-HPI-Challenge TC6.1 WC with 17.5t motor. Of course the 4WS had the stronger motor, but still I was not unhappy with its maiden drive.
I start thinking about how I could prevent myself from these experiences. I couldn't find the right car balance, I needed more steering, but on the quest for it you will often end up with oversteering (a sliding rear in the worst case) and/or a braking effect through too much wheel angle. My thought then was: If these are the problems then will a four wheel steering be able to cure these?
Since I put a TC6 into CAD two years ago it was easy to play around with the solids and check if my idea could work, or what needs to be changed on the existing car to make it work. This were the first results:


In addition to the four wheel steering the car includes two other ideas:
1. the use of Shorty LiPos
and
2. a special LiPo brace which should allow a unhindered chassisflex while holding the battery.
Conversations are expensive. I tried to reduce the costs by needing only a few prototype parts. I was proud when my first design needed only six special parts. I took the motormount and the spurgearbulkheads and placed them 12mm forward to make space for the rear steering rack. Together with the new wholes for the LiPo brace (I called it LiPo flex base) a new topdeck was needed; two new belts for the changed distance from belt pulley to the differentials also; and finally a 120mm long turnbuckle to connect the servo with the front steering arm after I put it behind the shorty LiPo. A double sided servoarm had also to be found

Thats it with the "special" parts. Of course in comparison to a normal TC another pair of front suspension parts are also needed. But since I have so much spares I could save money.
The next step then was to contact my miller to check my parts geometry and order some cfk. The steering turnbuckle and the doublesided servoarm came from HongKong and took some weeks. The cfk was ordered in a german shop like the belts and came with the milled prototype parts very fast to my home:

Like always I couldn't resist and assembled everything:

I couldn't wait for the small parts arriving from HongKong and annoyed a friend to bring a doublesided servoarm from a Sav�x servo (I threw my away just some weeks before
). So I could prepare the car for its maiden drive:



I chose the indoor carpet track of G�nzburg for the first outing. The car was equipped with a 10.5t which is too much power for a protoype on its first meters. Whatever I was too lazy to change the motor and began.
The steering setup was completly wrong. The rear had more steering geometry than the front and it looked strange. After getting used to the new behaviour the car was everything else but not slow! It loved switchbacks. Direction changes happened incredibly fast. In fast corners I had an understeer. This is something I think can be solved with a setup tweak. For the first day I just wanted to concentrate on the steering. For the second run I reduced the rear steering angle to have always the same angles front and rear. The understeer stayed, but steering a little earlier reduced it.
Driving a car with four wheel steering is another world. Interestingly I had to steer earlier than with my TC6.1. Driving it after the 4WS it seemed to steer much stronger and angular. The 4WS race line is just a perfect smooth curve (like ice skating). What seems to be a fight between front and rear axle when driving my TC6.1 on the edge is much more relaxed, swinging, just without overstressing the tires. I could go the same speed as my LRP-HPI-Challenge TC6.1 WC with 17.5t motor. Of course the 4WS had the stronger motor, but still I was not unhappy with its maiden drive.
Last edited by wtcc; 02-15-2013 at 08:52 AM.
02-15-2013, 03:51 AM
#4

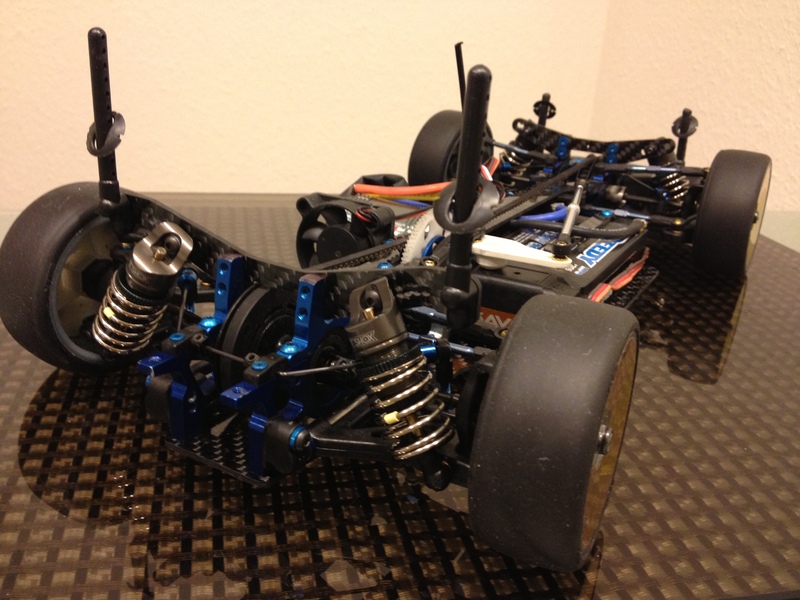
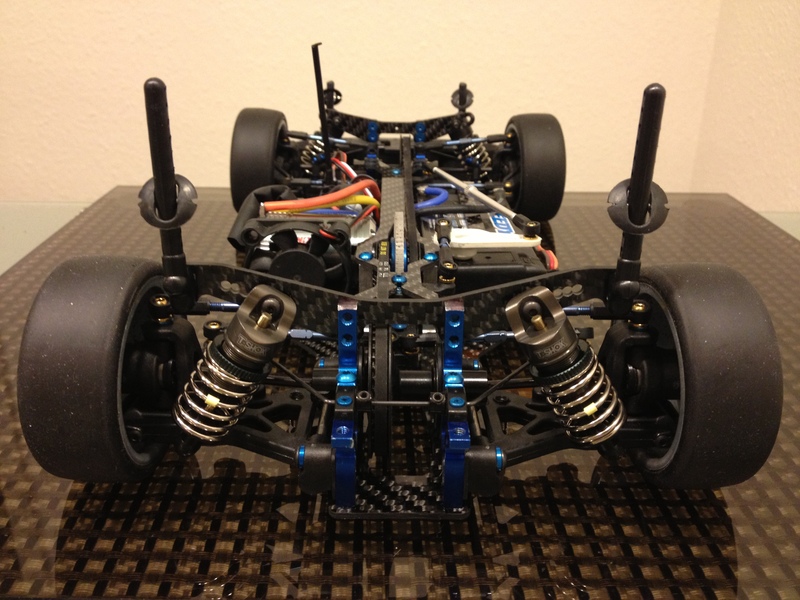
Three weeks later the small parts from HongKong arrived and I prepared the car for its next testdrive. I also changed the servo position. It was turned 180� to reduce the angles of the turnbuckles. In the first test day it showed that the steering in the rear was not equal left to right. I also raised the servo 2.5mm to prevent a collision of the servo arm with the topdeck.
If you look closely you can also see that I the front steering angles will be greater than the rear.
02-15-2013, 04:25 AM
#6
Great thread wttc, I admire your work because I also always have many conversions and projects (much more simple then yours) in my head, unfortunately due to limited time only some of them are realised. Keep up the good work and keep us posted with photos, videos and stories  I hope you will be able to race it without issues with rules though :/
I hope you will be able to race it without issues with rules though :/
I hope you will be able to race it without issues with rules though :/
 02-15-2013, 04:34 AM
02-15-2013, 04:34 AM
#7
After the second test day on my home track in Senden it showed that the car has a lot potential on tight tracks. It again was incredible agile and a lot of fun to drive! The changes worked very good. The steering was consistent and the car just worked! My LiPoFlexBase made the batterychange easy even though it was hold by two screws from the chassis bottom side. The setup needed more attention as I had much to much steering out of the corner. Unfortunately I couldn't take the next step as problems occured:
My low-budget-idea to glue the servo with Shoe-Goo on the chassis just works if you have no stronger hits with the boards. I had (bad) luck as the the loosened servo pushed agaist the also just glued shorty LiPo. It became also loose
Glueing these two was then abandoned from my mind and I needed new ideas. The second test day was abortet.
Back home I recapitulated my problems before looking for solutions:
1. The belt tension could be better (I didn't get one belt as needed),
2. The servo mounting is not chrashsave,
3. The battery disconnects under heat and hits form the LipoFlexBase.
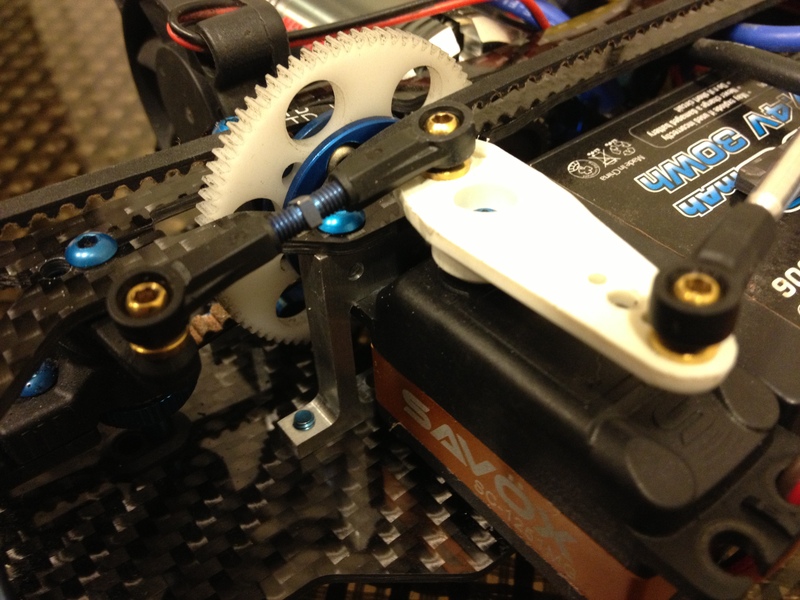
To solve the first problem I relocated the spurgear/belt pulleys one millimeter to the front; the rear very loose belt gets more tension and the front belt less. Therefor new parts are required. Aluminium is cheaper than cfk so I decided to let new spurgearbulkheads mill.

Another advantage is that the rear steering arm gets more turn angle.
My second problem found its solution also within the redesign of the spurgearbulkheads:

For the servo I need a solid mounting with screws. The location near the spurgearbulkhead is an advantage. With the new design I can use the servomounts (how do you call it in english?), push them into the bulkhead and srew them together.
Finally I had to change the batterymount. I decided to choose the classic, tapefree version with a battery brace in combination with a holddownsystem. Because of no space on the servo side the front brace is much longer than normal. The servo prevents the battery from leaving the car to the rear As holddown I decided to use the system RSD offers. As I have only one holddown at the front the small cfk plate has to grow to support the whole battery.


Overall five new parts are required:
1 x Spurgearbulkhead right,
1 x Spurgearbulkhead left,
1 x cfk brace,
1 x cfk plate,
1 x Aluminiumplate to mount the batterybrace
additionally I needed to drill two holes into the chassis for the batterybrace. With these changes the car should be solid enough for an endurance test

My low-budget-idea to glue the servo with Shoe-Goo on the chassis just works if you have no stronger hits with the boards. I had (bad) luck as the the loosened servo pushed agaist the also just glued shorty LiPo. It became also loose
Glueing these two was then abandoned from my mind and I needed new ideas. The second test day was abortet.
Back home I recapitulated my problems before looking for solutions:
1. The belt tension could be better (I didn't get one belt as needed),
2. The servo mounting is not chrashsave,
3. The battery disconnects under heat and hits form the LipoFlexBase.
To solve the first problem I relocated the spurgear/belt pulleys one millimeter to the front; the rear very loose belt gets more tension and the front belt less. Therefor new parts are required. Aluminium is cheaper than cfk so I decided to let new spurgearbulkheads mill.

Another advantage is that the rear steering arm gets more turn angle.
My second problem found its solution also within the redesign of the spurgearbulkheads:

For the servo I need a solid mounting with screws. The location near the spurgearbulkhead is an advantage. With the new design I can use the servomounts (how do you call it in english?), push them into the bulkhead and srew them together.

Finally I had to change the batterymount. I decided to choose the classic, tapefree version with a battery brace in combination with a holddownsystem. Because of no space on the servo side the front brace is much longer than normal. The servo prevents the battery from leaving the car to the rear
As holddown I decided to use the system RSD offers. As I have only one holddown at the front the small cfk plate has to grow to support the whole battery.

Overall five new parts are required:
1 x Spurgearbulkhead right,
1 x Spurgearbulkhead left,
1 x cfk brace,
1 x cfk plate,
1 x Aluminiumplate to mount the batterybrace
additionally I needed to drill two holes into the chassis for the batterybrace. With these changes the car should be solid enough for an endurance test
 02-15-2013, 05:35 AM
02-15-2013, 05:35 AM
#8
Thank you guys! I really would like to see your ideas! There are so many creative people in our sport, but they are "hiding" somewhere . I love this hobby because you can do a lot. Unfortunately I have no garage or space for tools so I have to let somebody make the parts for me...
I continue with the project report:
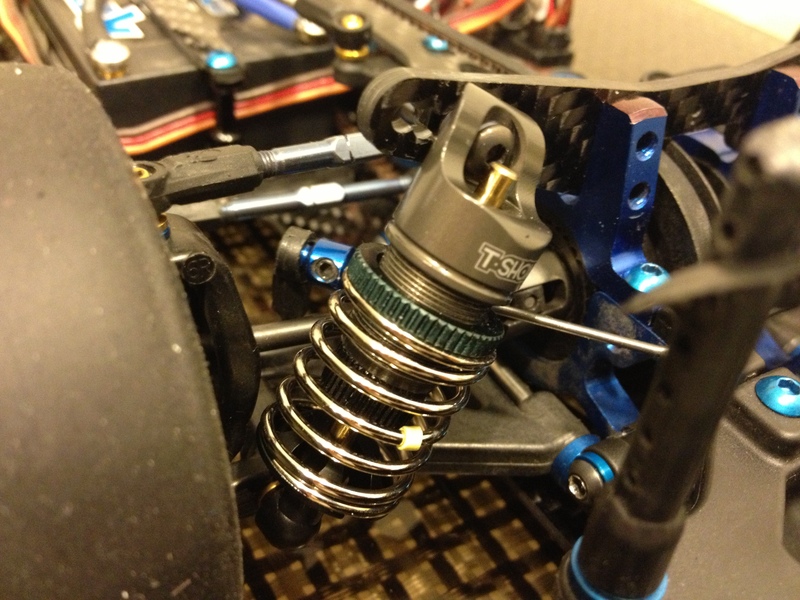
On the second of february the new parts arrived from Slovenia. In january TShox came out with short shocks for the T4. As I am in love with the idea of a shaft through shock for many years now, I couldn't resist.
So when knowing the short TShox will be in my hands soon I alarmed my miller to make new shocktowers from the leftover cfk. Before I analyzed the T4 of a friend and build the T4-shocks in CAD.
The assembling worked out quite good. Even my handdrilled holes were exact. The belttension is much better now and the car makes a good impression:







 [/QUOTE]
[/QUOTE]
. I love this hobby because you can do a lot. Unfortunately I have no garage or space for tools so I have to let somebody make the parts for me...I continue with the project report:
On the second of february the new parts arrived from Slovenia. In january TShox came out with short shocks for the T4. As I am in love with the idea of a shaft through shock for many years now, I couldn't resist.
So when knowing the short TShox will be in my hands soon I alarmed my miller to make new shocktowers from the leftover cfk. Before I analyzed the T4 of a friend and build the T4-shocks in CAD.
The assembling worked out quite good. Even my handdrilled holes were exact. The belttension is much better now and the car makes a good impression:












 [/QUOTE]
02-15-2013, 05:40 AM
[/QUOTE]
02-15-2013, 05:40 AM
#9
One short video that shows the four wheel steering function:
http://www.youtube.com/watch?v=GEUVX...ature=youtu.be
http://www.youtube.com/watch?v=GEUVX...ature=youtu.be
02-15-2013, 06:10 AM
#10
Cool ! I'd be curious to see a video.
I've followed several of your projects and this one doesn't disappoint.
I remember trying to alter the angle of the toe-in link on my SST, to get some sort of " auto directional" effect . That was NOT good. Oh well, I was 15 and had too much imagination.
I've followed several of your projects and this one doesn't disappoint.
I remember trying to alter the angle of the toe-in link on my SST, to get some sort of " auto directional" effect . That was NOT good. Oh well, I was 15 and had too much imagination.
02-15-2013, 06:54 AM
#13
Last weekend I was on duty at my hometrack in Senden (http://indoor-racing-senden.de/). Of course I didn't just collect money from guestdrivers, but used the time to do some testing on the 4WS.
The week before it already showed to be strong, so I finally could concentrate on the setup
The first battery was driven with an unchanged car. I expected a nervous behaviour with too much steering beginning from middle corner. At least the last times the car was not very easy to drive and wanted a lot of attention. Surprisingly I could easily drive the car around the track and was able to bring a decent rhythm into the run without hitting anything. Not bad! The "too much steering" wasn't gone, but I could control it easily. Fascinating how fast the brain adapts to new conditions!
Concentration was still needed for the braking points. If you overdrive the car it won't break with steering front tires! It just drives a greater curve radius without reducing speed => Now I will learn to drive exactly at the limit.
So where to start from this point?
First of all I wanted to get rid of the nervous rear when turning into fast corners after deceleration. This behaviour means a lot of danger for my prototype car and takes away all the trust going into the corner and of course: time! I was still using a standard TC setup and had -2.5� toe at the rear. I tried to comprehend what the rear tires will do in the corner. I came to the conclusion that the inner tire in the corner with the steering will have much more than the -2.5� toe and will be pushing the rear strongly to the outside, forcing the outer tire to loose grip. For the setup it means that a decrease of negative toe will make the rear more planted because the tires can take the load.
I don't know why this thought came into my mind first. In normal theory I would increase rear toe in on a tc. So I had my doubts that this tweak would work. I had to test it to find out!
Aaaaaand it worked! The car drove as it got rid of something negative; won much more grip while still staying agile as hell. I could dive deep into the fast corner after the straight without shedding a thought about the rear. The nervous car was calmed. When one highly sponsored guestdriver joined me on the track I was able to compare corner speeds. Always when I hit the corner with the right amount of speed (limit) the car turned better and had its nose in front of the curvy sections. I was happy! The car was still not easy to drive, but showed its potential.
My car creates some interest whenever it is on my table. Many guys look at it or take it to risk an even closer look. This time I had Florian Botzenhard (Second in the german tc championship) as table neighbor. We spoke a lot about the car and he recommended not to use 4� c-hubs (I use them in a mirrored angle in comparison to the front c-hubs), but to use a less degree one. I was happy to get help from a pro driver and tried a 0� c-hub-pair. It didn't work at all! The car now drove as if I had forgotten to mount the rear wing. The camberincrease when using 4� c-hubs is more than noticeable. I think the last two examples show how different the car is to set up in comparison to standard tc's.
The next step for me was to make the car easier to drive. One of our guest drivers suggested to use two servos, one for every steering rack to get the full advantage out of the four wheel steering. And he is right. In tight corners the rear steering has a full impact by increasing the car performance. I couldn't build it with two servos just so, but I wanted to change the steering feeling nevertheless. The TC6 steering offers two categories for the adjustment: speed and Ackermann. I decided to try 2C/7A on the rear steering. This means a slow steering with more Ackermann. The next run showed that the rear was tame. Too tame for my liking, but it worked
I now experienced a little understeer. The laptimes were as fast as another clubguy who has the same motor in his Xray T4 (around 10.5s - 10.7s)
The rear was to strong now, but I let it like it was. I still missed some accuracy while driving. That was caused by the use of long camber links. Due to an error in reasoning I forgot to add camberlinkholes in my shocktowers. My only option was to make the links parallel to the suspension arms. So I changed the rollcenter. The car was now much better to drive and extreme consistent, but around one tenth slower a lap.
In my last battery of the day I raced along with the sponsored guestdriver and we had an "epic" battle for nearly ten minutes. So this was a superb last run!
The week before it already showed to be strong, so I finally could concentrate on the setup
The first battery was driven with an unchanged car. I expected a nervous behaviour with too much steering beginning from middle corner. At least the last times the car was not very easy to drive and wanted a lot of attention. Surprisingly I could easily drive the car around the track and was able to bring a decent rhythm into the run without hitting anything. Not bad! The "too much steering" wasn't gone, but I could control it easily. Fascinating how fast the brain adapts to new conditions!
Concentration was still needed for the braking points. If you overdrive the car it won't break with steering front tires! It just drives a greater curve radius without reducing speed => Now I will learn to drive exactly at the limit.
So where to start from this point?
First of all I wanted to get rid of the nervous rear when turning into fast corners after deceleration. This behaviour means a lot of danger for my prototype car and takes away all the trust going into the corner and of course: time! I was still using a standard TC setup and had -2.5� toe at the rear. I tried to comprehend what the rear tires will do in the corner. I came to the conclusion that the inner tire in the corner with the steering will have much more than the -2.5� toe and will be pushing the rear strongly to the outside, forcing the outer tire to loose grip. For the setup it means that a decrease of negative toe will make the rear more planted because the tires can take the load.
I don't know why this thought came into my mind first. In normal theory I would increase rear toe in on a tc. So I had my doubts that this tweak would work. I had to test it to find out!
Aaaaaand it worked! The car drove as it got rid of something negative; won much more grip while still staying agile as hell. I could dive deep into the fast corner after the straight without shedding a thought about the rear. The nervous car was calmed. When one highly sponsored guestdriver joined me on the track I was able to compare corner speeds. Always when I hit the corner with the right amount of speed (limit) the car turned better and had its nose in front of the curvy sections. I was happy! The car was still not easy to drive, but showed its potential.
My car creates some interest whenever it is on my table. Many guys look at it or take it to risk an even closer look. This time I had Florian Botzenhard (Second in the german tc championship) as table neighbor. We spoke a lot about the car and he recommended not to use 4� c-hubs (I use them in a mirrored angle in comparison to the front c-hubs), but to use a less degree one. I was happy to get help from a pro driver and tried a 0� c-hub-pair. It didn't work at all! The car now drove as if I had forgotten to mount the rear wing. The camberincrease when using 4� c-hubs is more than noticeable. I think the last two examples show how different the car is to set up in comparison to standard tc's.
The next step for me was to make the car easier to drive. One of our guest drivers suggested to use two servos, one for every steering rack to get the full advantage out of the four wheel steering. And he is right. In tight corners the rear steering has a full impact by increasing the car performance. I couldn't build it with two servos just so, but I wanted to change the steering feeling nevertheless. The TC6 steering offers two categories for the adjustment: speed and Ackermann. I decided to try 2C/7A on the rear steering. This means a slow steering with more Ackermann. The next run showed that the rear was tame. Too tame for my liking, but it worked
I now experienced a little understeer. The laptimes were as fast as another clubguy who has the same motor in his Xray T4 (around 10.5s - 10.7s)
The rear was to strong now, but I let it like it was. I still missed some accuracy while driving. That was caused by the use of long camber links. Due to an error in reasoning I forgot to add camberlinkholes in my shocktowers. My only option was to make the links parallel to the suspension arms. So I changed the rollcenter. The car was now much better to drive and extreme consistent, but around one tenth slower a lap.
In my last battery of the day I raced along with the sponsored guestdriver and we had an "epic" battle for nearly ten minutes. So this was a superb last run!
02-15-2013, 07:17 AM
#15
I had a Schumacher SST back in the day and always wondered what it would be like with a servo on the rear links for 4ws (I also thought about attaching a servo to the motor endbell for dynamic timing advance, 12 years before it came along for brushless... definitely should have done that one!).
In BRCA rules the only item that affects this area is that you can't use the third channel on the receiver for control (so you can't run two independant servos). But you can run two servos off the same channel if you desire. I'd imagine most other rules are similar.
Keep the updates coming