


Optimum RPM range for PM DC motors in RC cars?
 12-10-2013, 02:16 PM
12-10-2013, 02:16 PM
#1
Hi all,
I am trying to understand DC motor performance in RC cars to determine the "optimum" gearing load and I could really use some help with that.

I understand the max output power of permanent magnet DC motors is at 50% of the no-load speed and the max efficiency is at around 80-90% of the no-load speed, depending on motor design (please correct me if I'm wrong here). In addition, I have read that for optimal continuous performance, DC motors should typically operate at 70-90% of the no-load speed (see pic below).
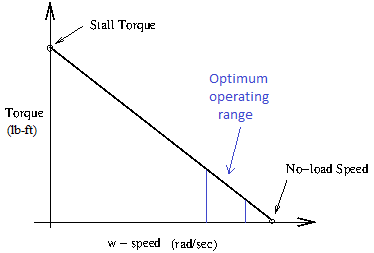
Does this 70-90% range apply to RC car applications too (as it's not really running continuously)? In other words, what RPM operating range would be optimal for RC car applications? Will there be a difference for on/off road usage and scale of the car? Bashing vs racing? Is there a golden rule?
Thanks!
I am trying to understand DC motor performance in RC cars to determine the "optimum" gearing load and I could really use some help with that.
I understand the max output power of permanent magnet DC motors is at 50% of the no-load speed and the max efficiency is at around 80-90% of the no-load speed, depending on motor design (please correct me if I'm wrong here). In addition, I have read that for optimal continuous performance, DC motors should typically operate at 70-90% of the no-load speed (see pic below).
Does this 70-90% range apply to RC car applications too (as it's not really running continuously)? In other words, what RPM operating range would be optimal for RC car applications? Will there be a difference for on/off road usage and scale of the car? Bashing vs racing? Is there a golden rule?
Thanks!
 12-10-2013, 02:35 PM
12-10-2013, 02:35 PM
#2

Here's a quick synopsis of gearing for different motors:
Higher-turn (less powerful) motors are usually geared to keep them near their peak horsepower for most of the time during the lap, just the same as for full-scale racing cars. ("Higher-turn" motors would likely include 17.5 on 1s LiPo, and 25.5 on 2s LiPo.) The horsepower peak on all permanent magnet DC motors occurs at 1/2 of the free-running RPM (provided the battery and speed control do not have significant losses). If you have the equipment to measure the length of your racing ("run") line on the track, the RPM of the motor, and know your expected lap time, you can calculate the correct rollout as follows:
Rollout (inches/revolution) =
2 x
[1 / free_running_motor_speed (revolutions/minute)] x
[run_line (feet)] x
[12 (inches/foot)] x
[60 (seconds/minute)] x
[1 / lap_time(seconds)]
(You'll probably want to change the units to metric since you are in Germany.)
If these values are unknown, start with a conservative recommendation from a fellow racer who is familiar with the track.
More powerful motors are usually thermally-limited, meaning they would overheat if geared as described above, so they must be geared so their average speed is above the peak power speed. Select a rollout to keep the temperature in the range recommended by the motor manufacturer (usually 140F to 160F maximum). Again, start with a conservative recommendation from a fellow racer who is familiar with the track. The actual rollout you need will depend on your driving style, which is reflected in how many mAh you pull from the battery during a race. Smoother, more experienced drivers get around the track using less throttle than others, and can use a higher rollout without overheating the motor.
Higher-turn (less powerful) motors are usually geared to keep them near their peak horsepower for most of the time during the lap, just the same as for full-scale racing cars. ("Higher-turn" motors would likely include 17.5 on 1s LiPo, and 25.5 on 2s LiPo.) The horsepower peak on all permanent magnet DC motors occurs at 1/2 of the free-running RPM (provided the battery and speed control do not have significant losses). If you have the equipment to measure the length of your racing ("run") line on the track, the RPM of the motor, and know your expected lap time, you can calculate the correct rollout as follows:
Rollout (inches/revolution) =
2 x
[1 / free_running_motor_speed (revolutions/minute)] x
[run_line (feet)] x
[12 (inches/foot)] x
[60 (seconds/minute)] x
[1 / lap_time(seconds)]
(You'll probably want to change the units to metric since you are in Germany.)
If these values are unknown, start with a conservative recommendation from a fellow racer who is familiar with the track.
More powerful motors are usually thermally-limited, meaning they would overheat if geared as described above, so they must be geared so their average speed is above the peak power speed. Select a rollout to keep the temperature in the range recommended by the motor manufacturer (usually 140F to 160F maximum). Again, start with a conservative recommendation from a fellow racer who is familiar with the track. The actual rollout you need will depend on your driving style, which is reflected in how many mAh you pull from the battery during a race. Smoother, more experienced drivers get around the track using less throttle than others, and can use a higher rollout without overheating the motor.
12-10-2013, 02:42 PM
#3
The 70-90% number is for optimum efficiency. Since we have big batteries these days, we don't really care about efficiency as long as nothing melts. So we trade off efficiency for power.
However, on a typical race course, the motor operates over a pretty wide range so you can't really tune it to just operate at peak power. Plus there are so many variables involved that you really just have to tune the gearing by trial and error to get the best lap time.
However, on a typical race course, the motor operates over a pretty wide range so you can't really tune it to just operate at peak power. Plus there are so many variables involved that you really just have to tune the gearing by trial and error to get the best lap time.
12-11-2013, 01:30 PM
#4
Thanks for your explanations guys, much appreciated!
12-11-2013, 02:24 PM
#5
A good indication of how wide this range really is can be found from looking at the average power used over a race. One case I have concrete data on is a 2400 Castle 1415 run on 3S LiPo in a Ten SCTE for a 10 minute off-road race. The average power used was about 190 watts. That system is probably capable of 1000+ watts peak output (a guess by me comparing the castle motor to a Nue motor for which a rating is available).
Currently Active Users Viewing This Thread: 1 (0 members and 1 guests)


